การถ่ายภาพด้วยระบบPhotoRobot
หลังจากสร้างพื้นที่ทํางานในแอป PhotoRobot Controls (หรือที่เรียกกันเพิ่มเติมว่า "CAPP") อินเทอร์เฟซ Capture จะอนุญาตให้ผู้ใช้ควบคุมฮาร์ดแวร์และกล้องPhotoRobotเพื่อทําให้การจับภาพ และวิดีโอเป็นไปโดยอัตโนมัติ
อินเทอร์เฟซการจับภาพ
อินเทอร์เฟซ CAAP Capture ประกอบด้วย 4 พื้นที่หลัก:
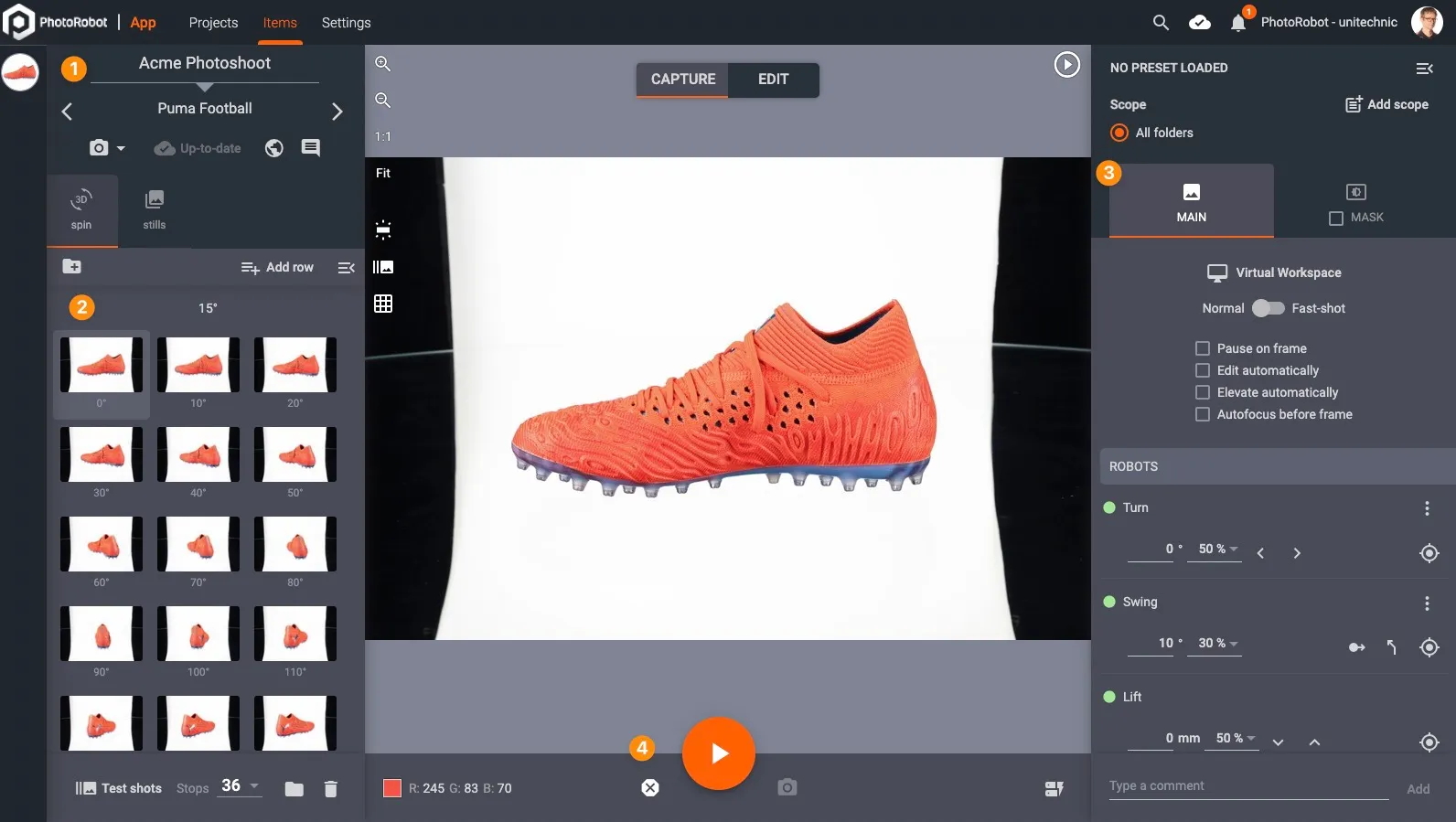
- ข้อมูลรายการ
- โฟลเดอร์เฟรมและรูปภาพ
- การกําหนดค่าฮาร์ดแวร์
- การควบคุมลําดับ
สร้างรายการใหม่
ใน CAPP โครงการสามารถประกอบด้วยรายการเดียวอย่างน้อยหนึ่งรายการ ในขณะที่โดยทั่วไปแล้วรายการนั้นจะเป็นวัตถุที่ถ่ายภาพเฉพาะ จากนั้นรายการสามารถรวมโฟลเดอร์อย่างน้อยหนึ่งโฟลเดอร์เพื่อแยกรูปภาพประเภทต่างๆ ออกจากกัน ตัวอย่างที่พบบ่อยที่สุดคือการกําหนดโฟลเดอร์หนึ่งสําหรับการหมุน 360 องศา ("สปิน") และอีกโฟลเดอร์หนึ่งสําหรับภาพนิ่ง ("ภาพนิ่ง")
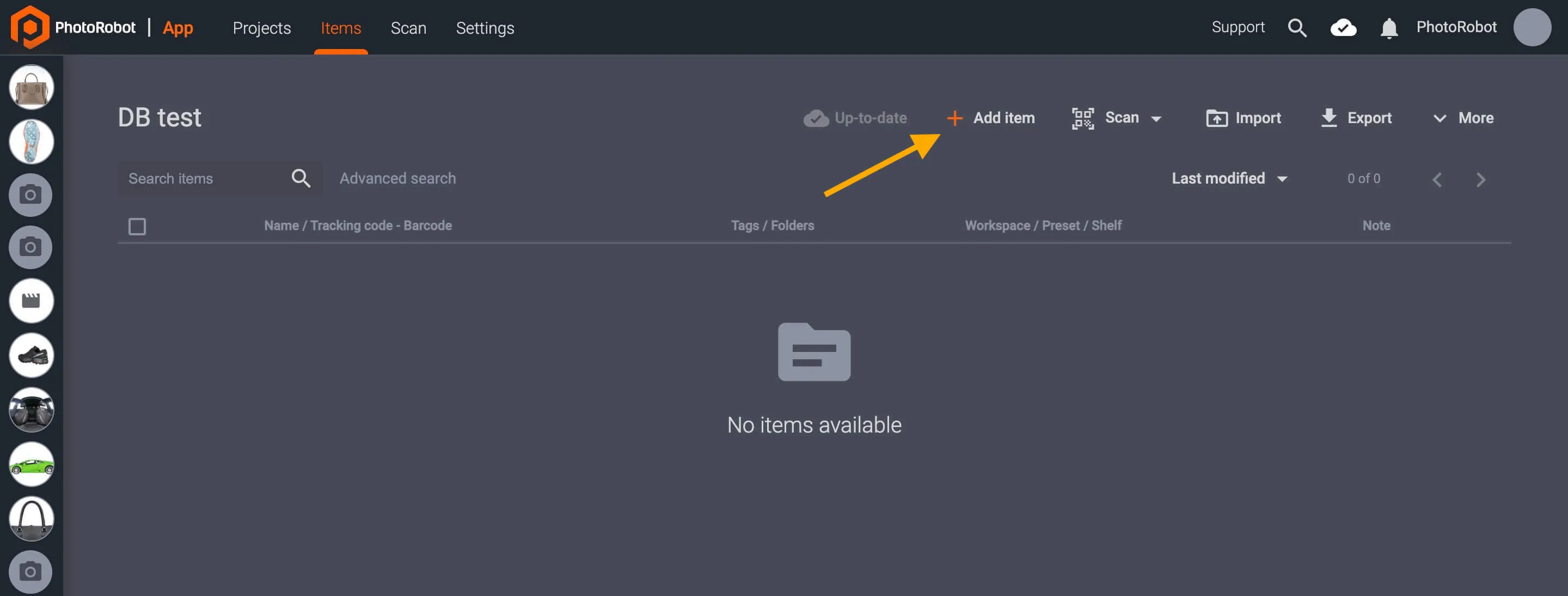
ก่อนเริ่มถ่ายภาพ คุณต้องเพิ่มโปรเจ็กต์ใหม่ (เว้นแต่จะใช้โปรเจ็กต์ที่มีอยู่แล้ว) และมีอย่างน้อยหนึ่งรายการ
เมื่อต้องการสร้างสินค้าใหม่ด้วยตนเอง ให้ไปที่ โครงการ และเลือก เพิ่มสินค้า
ถัดไปในหน้าต่างที่ปรากฏขึ้นการกรอกข้อมูลในฟิลด์ชื่อที่จําเป็นจะเปิดใช้งานปุ่มเพิ่มเพื่อสร้างรายการใหม่ ที่นี่ยังมีตัวเลือกในการกรอกข้อมูลรายการเพิ่มเติม: รหัสลิงก์บันทึกย่อมาโครและอื่น ๆ แม้ว่าฟิลด์เหล่านี้จะเป็นทางเลือกเท่านั้น
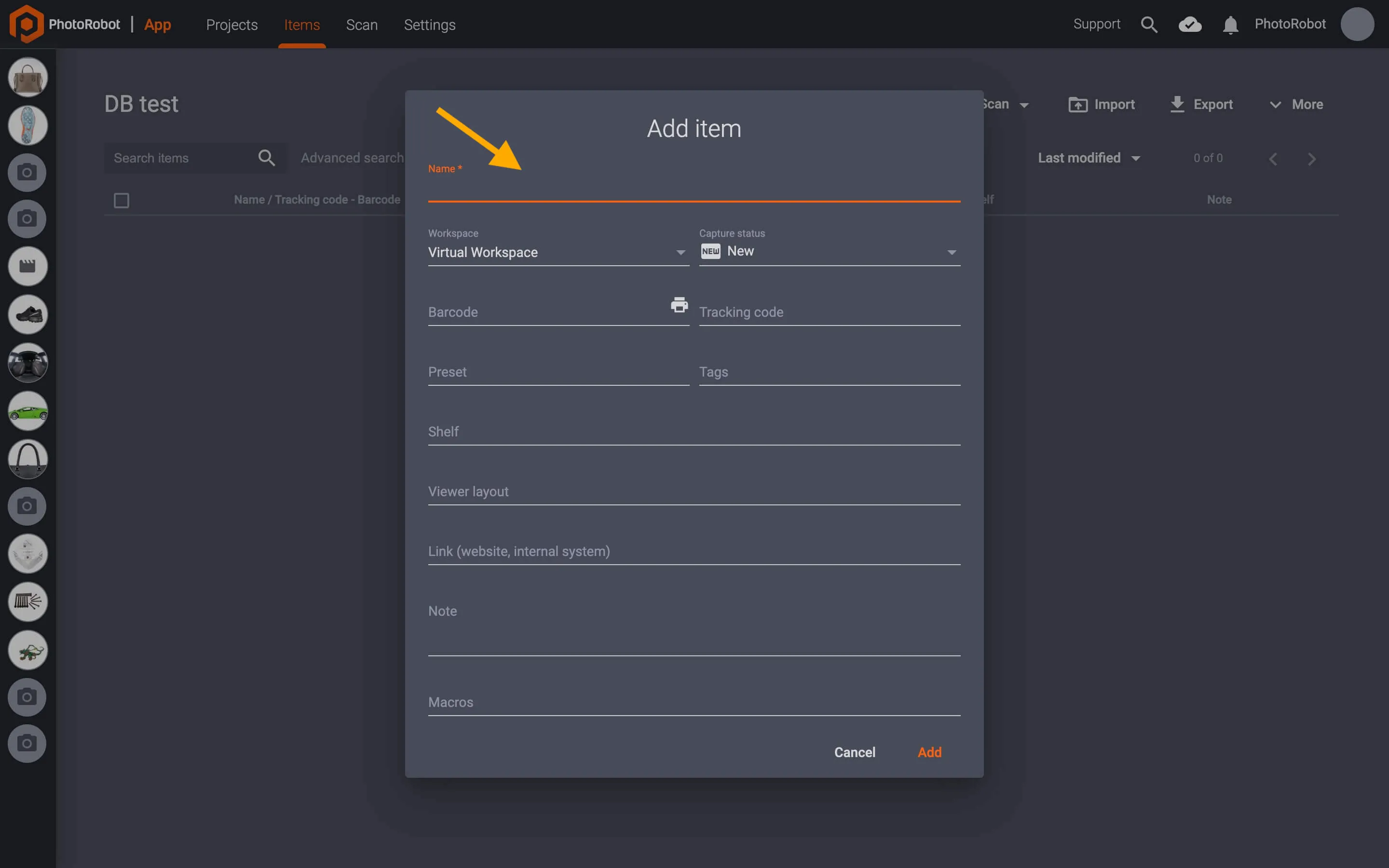
โน้ต: หากสินค้าใหม่มีบาร์โค้ด คุณสามารถป้อนหรือสแกนบาร์โค้ดสินค้าเข้าสู่ระบบได้เมื่อสร้างสินค้าใหม่ด้วยตนเอง:
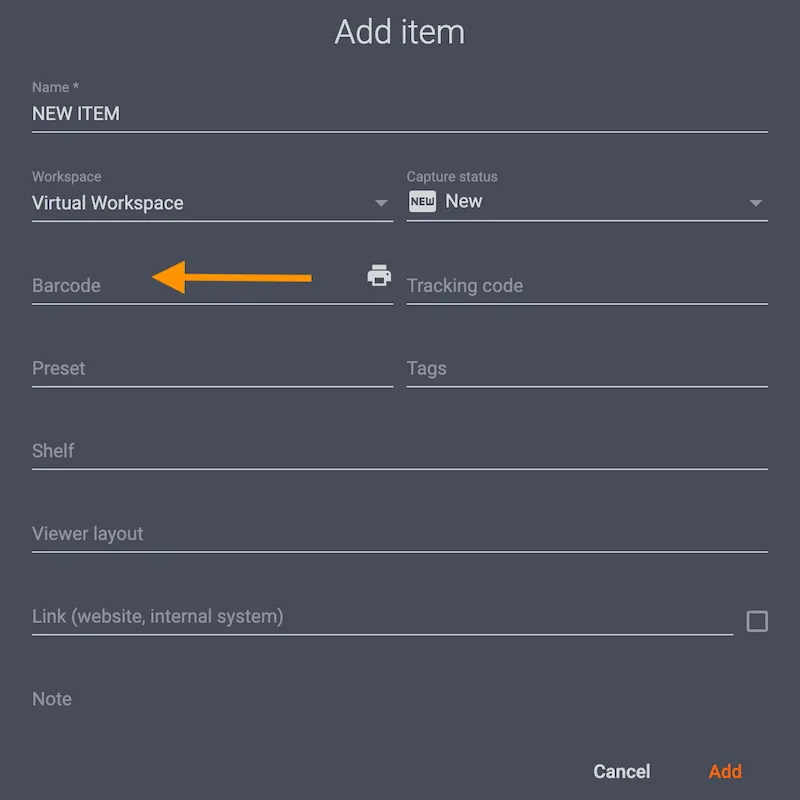
การเพิ่มบาร์โค้ดรายการลงในรายการจะช่วยให้สามารถแสดงบาร์โค้ดได้โดยตรงภายในอินเทอร์เฟซโหมดจับภาพโดยคลิกปุ่มบาร์โค้ดในพื้นที่ข้อมูลรายการ
อย่าลืมพิจารณาประเภทใบอนุญาตที่คุณใช้สําหรับ CAPP หากใช้สิทธิ์การใช้งานบนคลาวด์ จะมีแอตทริบิวต์เพิ่มเติมนอกเหนือจากในฟิลด์ด้านบน
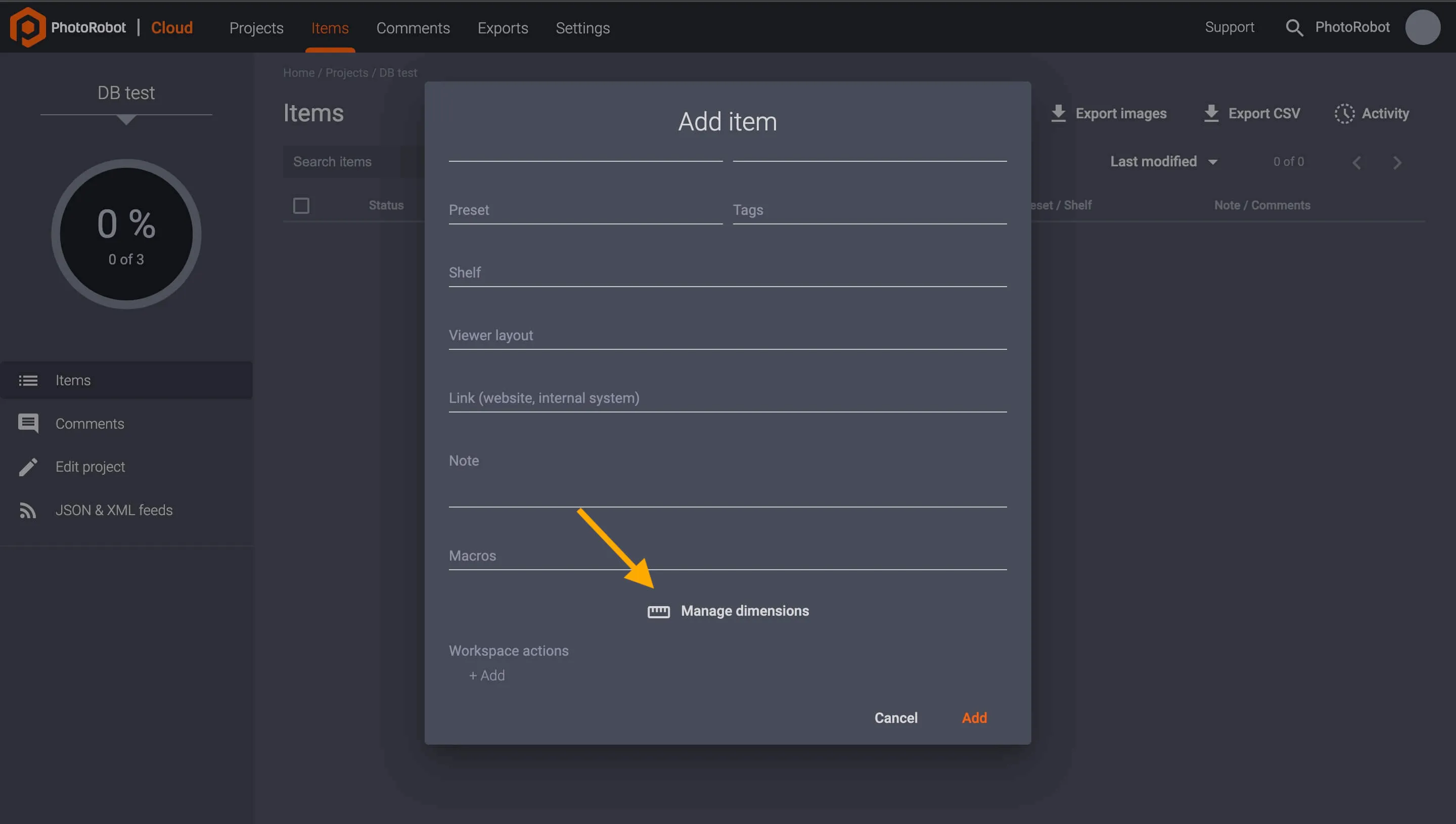
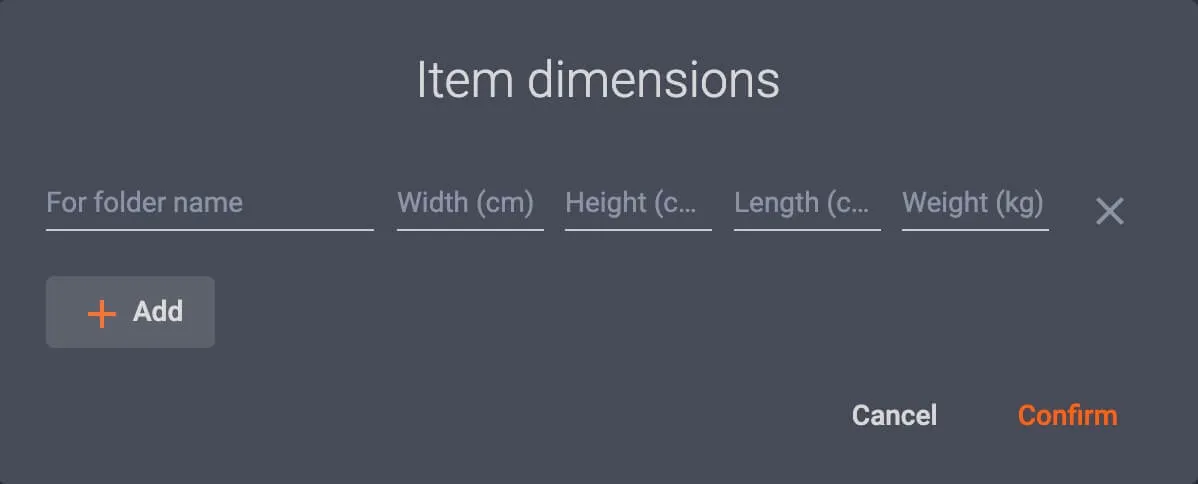
ด้วยสิทธิ์การใช้งานบนระบบคลาวด์ ให้เลื่อนไปที่ด้านล่างของตัวเลือกรายการใหม่ แล้วเลือก จัดการขนาด เพื่อเพิ่มความกว้าง ความสูง ความยาว และน้ําหนักของรายการ หมายเหตุ: การสมัครสมาชิกบนคลาวด์ที่ใช้งานอยู่ช่วยให้ผู้ใช้สามารถเพิ่มการวัดได้โดยไม่มีขีดจํากัดใดๆ กรอกแอตทริบิวต์ แล้วเลือก ยืนยัน เพื่อเพิ่มมิติให้กับสินค้า
คลิก เพิ่ม จากนั้นสร้างรายการใหม่ด้วยแอตทริบิวต์ ที่ผู้ใช้กําหนดค่าทั้งหมด
นําเข้ารายการใหม่
นอกจากนี้ยังสามารถสร้างหลายรายการในชุดเดียว โดยใช้ฟังก์ชันนําเข้า ข้อกําหนดเบื้องต้นของฟังก์ชันการนําเข้าสินค้าคือการนําเข้าผ่านไฟล์ CSV ไฟล์ CSV มีแอตทริบิวต์ทั้งหมดสําหรับแต่ละรายการที่ผู้ใช้จะนําเข้า
ไฟล์ CSV จัดเก็บข้อมูลแบบตารางเป็นข้อความธรรมดา พร้อมตัวคั่นเพื่อแยกแต่ละระเบียนข้อมูล หมายเหตุ: มีไฟล์ sample-import.csv สําหรับการนําเข้ารายการ ซึ่งสามารถดาวน์โหลดได้โดยตรงในแอปพลิเคชัน
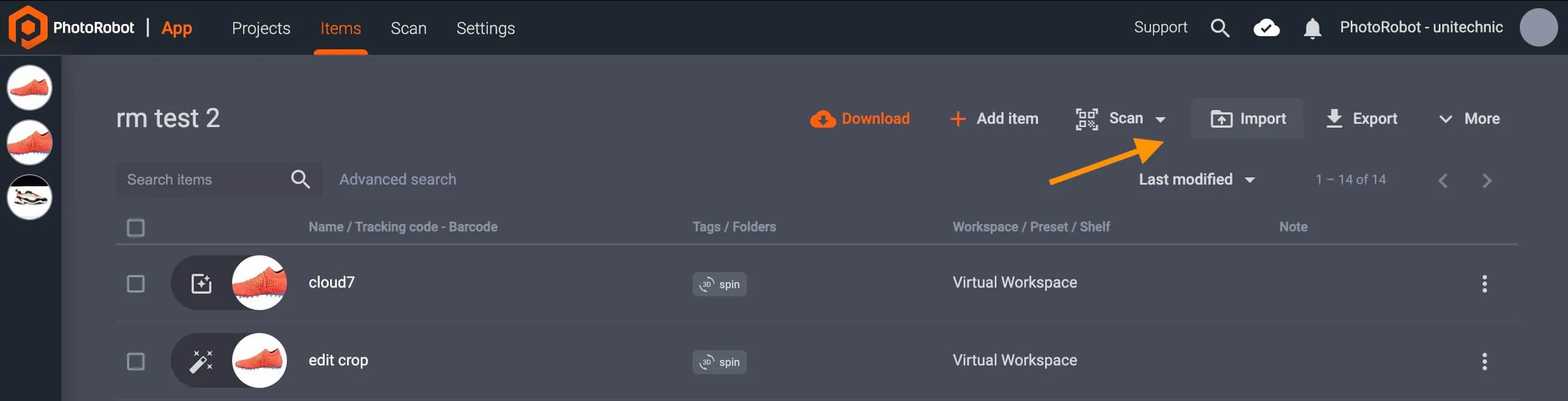
หากต้องการนําเข้ารายการใหม่ ให้ไปที่ โครงการ แล้วเลือก นําเข้า
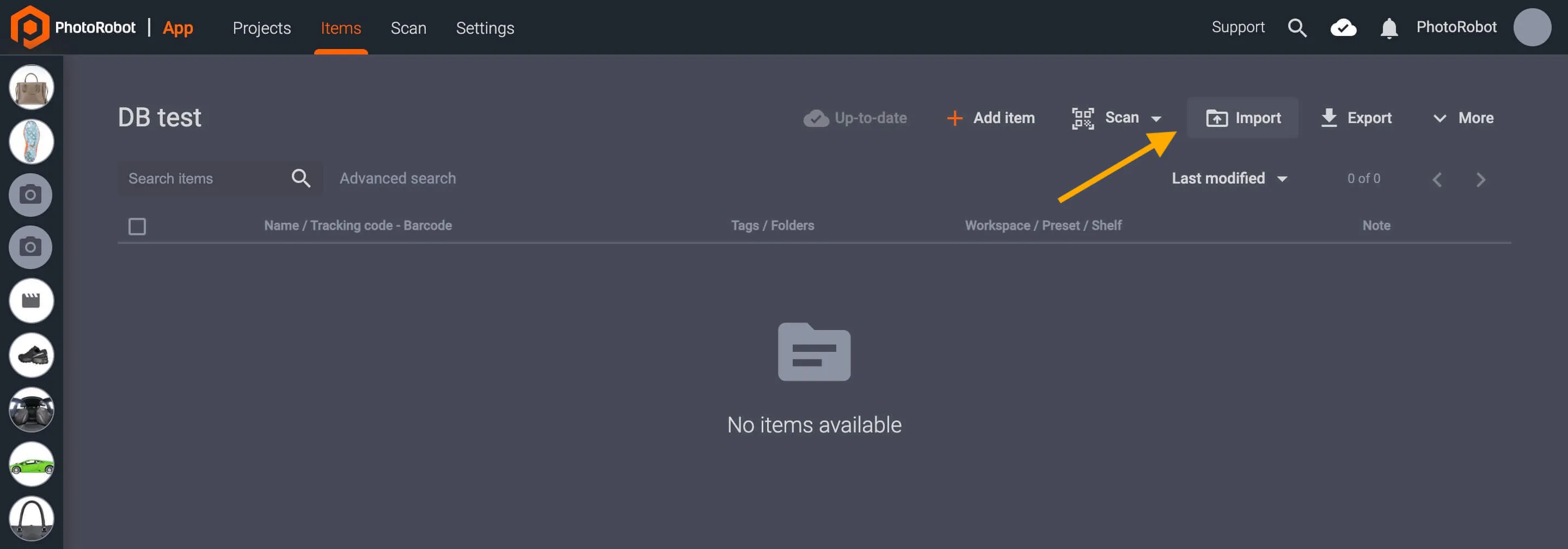
จากนั้นในหน้าต่างป๊อปอัปคุณสามารถลากและวางไฟล์ CSV หรือเรียกดูโฟลเดอร์ในเครื่องเพื่อนําเข้าไปยัง CAPP ผ่านปุ่มเรียกดูไฟล์
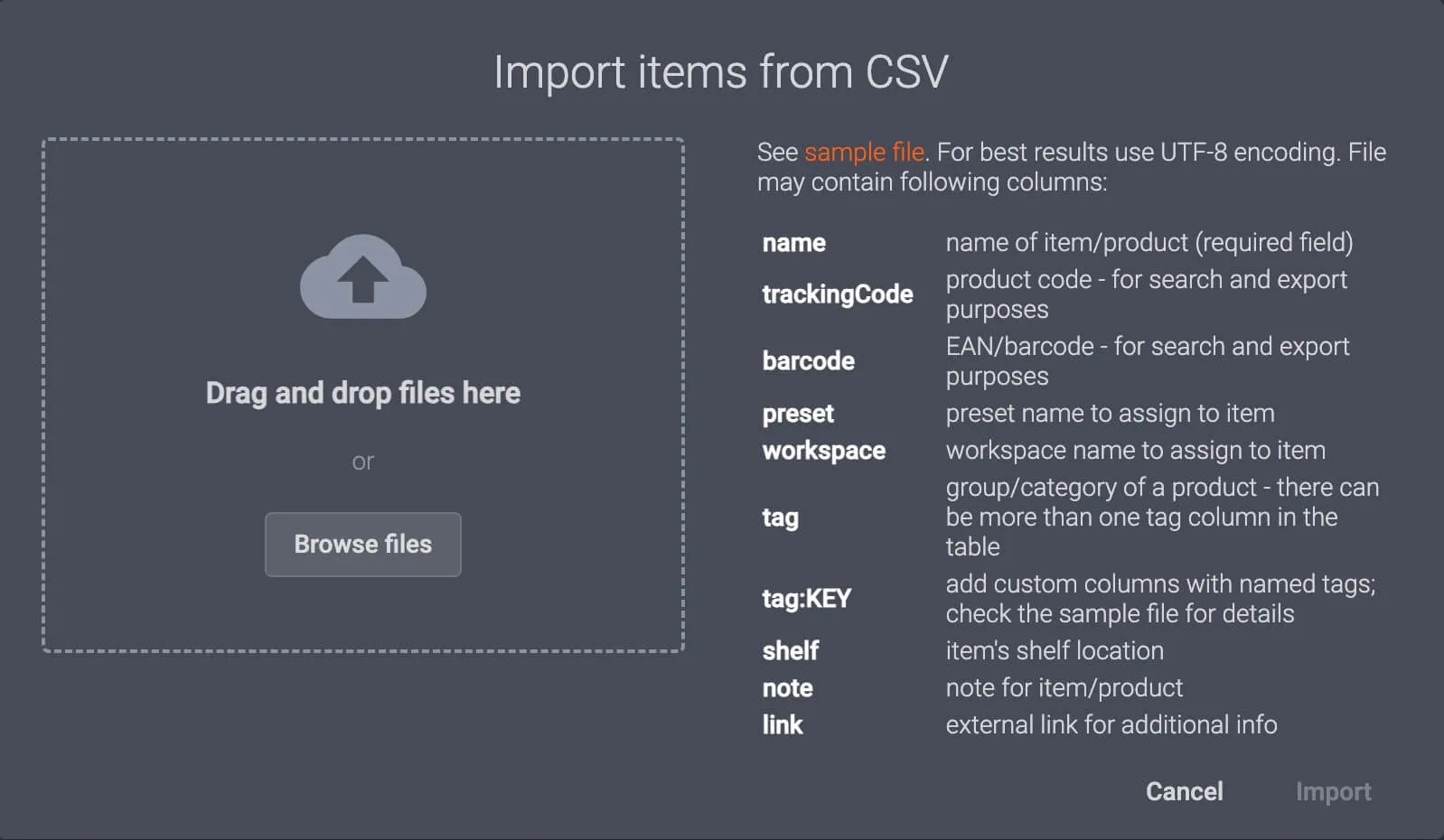
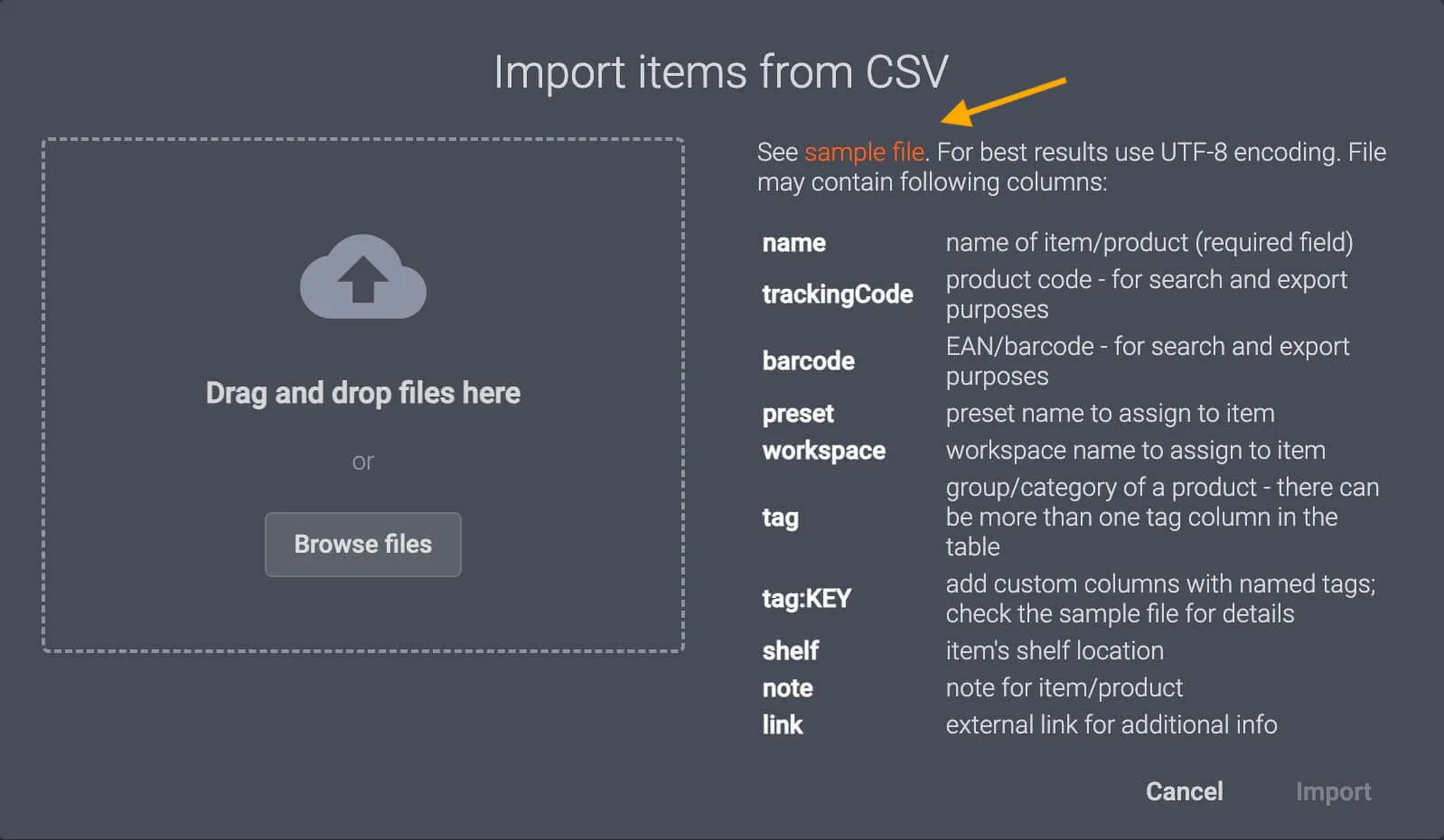
หากต้องการใช้ไฟล์ CSV ตัวอย่าง ให้คลิกไฟล์ ตัวอย่าง ที่ส่วนขวาบนของอินเทอร์เฟซ การดําเนินการนี้จะดาวน์โหลด CSV ตัวอย่างไปยังคอมพิวเตอร์ภายในเครื่อง
จำ: การนําเข้าสินค้าสามารถรวมขนาดสินค้า (ความยาว ความกว้าง ความสูง น้ําหนัก) โดยไม่มีข้อจํากัดใดๆ เกี่ยวกับสิทธิ์การใช้งานของผู้ใช้ที่ใช้งานอยู่
สร้างรายการใหม่อัตโนมัติ
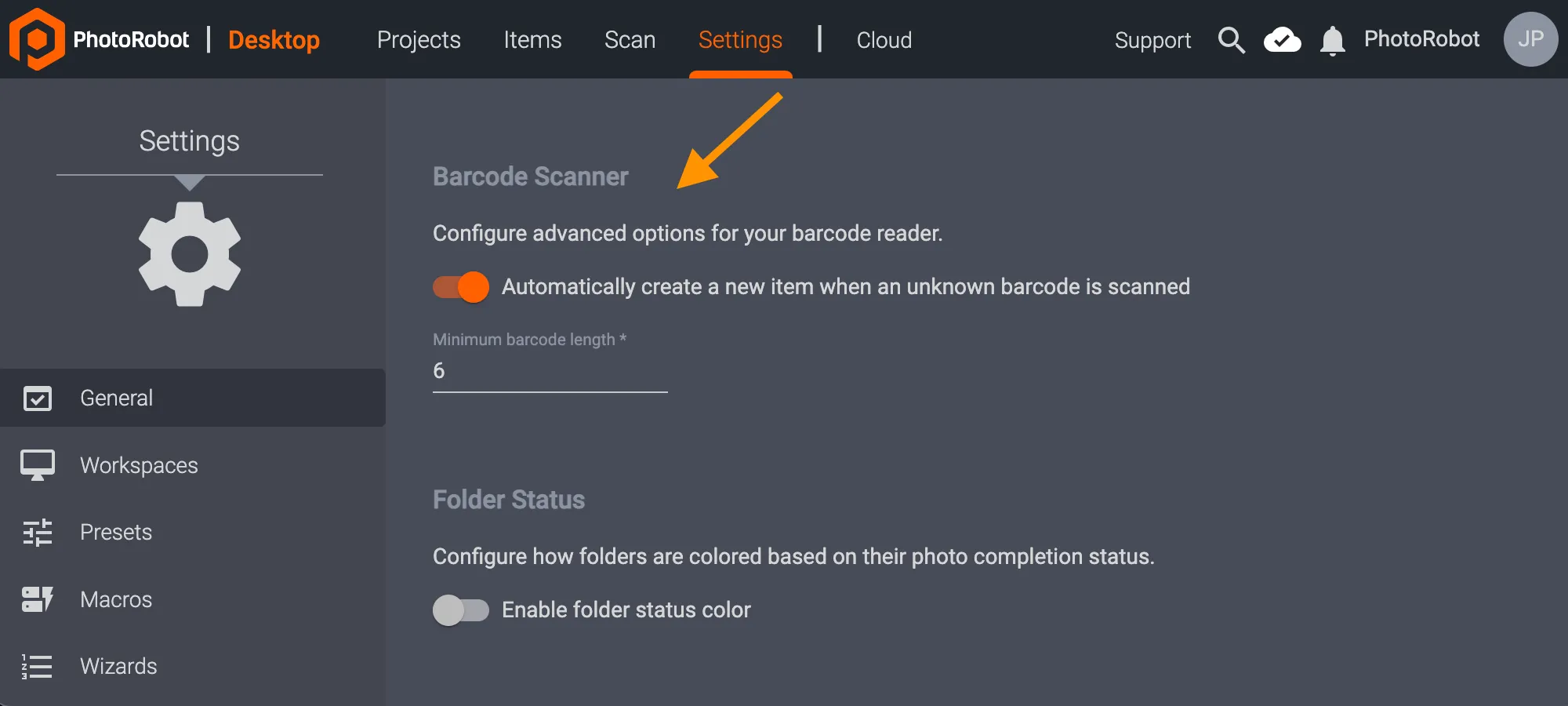
อีกทางเลือกหนึ่งในการสร้างรายการด้วยตนเองใน CAPP การตั้งค่าเครื่องสแกนบาร์โค้ดขั้นสูงจะเปิดใช้งานการสร้างรายการใหม่โดยอัตโนมัติหลังจากสแกนบาร์โค้ดที่ไม่รู้จัก การตั้งค่านี้ทําหน้าที่ระบุรายการ ณ จุดที่จับภาพ (โดยทั่วไปจะใช้บาร์โค้ดหรือรหัส QR) ผู้ปฏิบัติงานเพียงแค่สแกนรหัสที่ไม่รู้จัก และรายการใหม่จะถูกสร้างขึ้นโดยอัตโนมัติในโครงการ การตั้งชื่อสินค้าจะเป็นไปตามสตริงที่สแกน และในฟิลด์ ตัวระบุของสินค้า
หากต้องการเปิดหรือปิดใช้งานการสร้างรายการอัตโนมัติโดยเครื่องสแกนบาร์โค้ด ให้เข้าไปที่การตั้งค่าทั่วไปใน CAPP เวอร์ชันเดสก์ท็อปในเครื่อง ค้นหาการตั้งค่าเครื่องสแกนบาร์โค้ด และใช้ปุ่มสลับเพื่อกําหนดค่าเปิดหรือปิด สร้างรายการใหม่ในระบบโดยอัตโนมัติเมื่อสแกนบาร์โค้ดที่ไม่รู้จัก
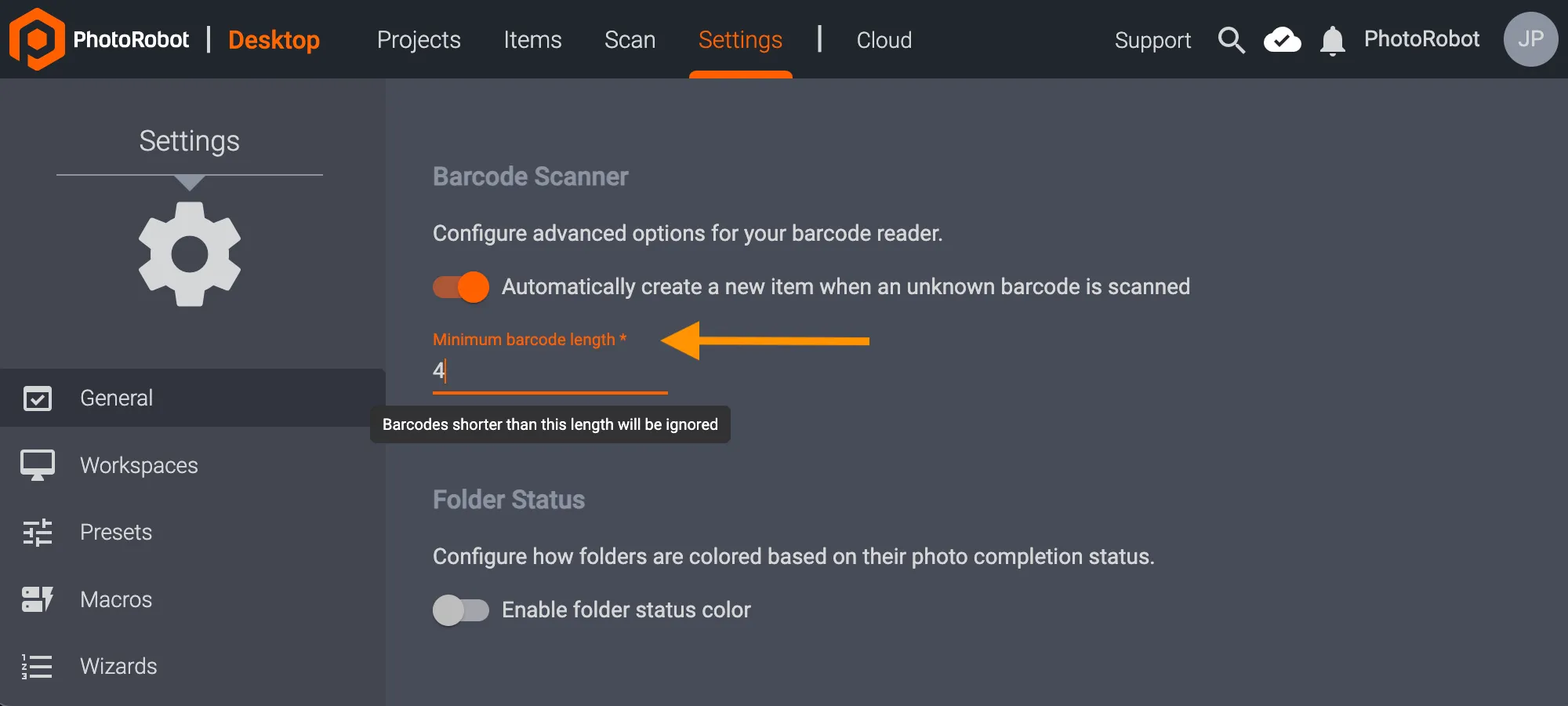
โน้ต: ตั้งแต่ CAPP เวอร์ชัน 2.13.beta58 ตอนนี้มีตัวเลือกในการกําหนดค่าความยาวสตริงขั้นต่ําสําหรับบาร์โค้ด ก่อนหน้านี้ความยาวบาร์โค้ด / คิวอาร์โค้ดขั้นต่ําคือ 6 อักขระ (เพื่อหลีกเลี่ยงการตีความสตริงที่สแกนแบบคู่ท่ามกลางปัญหาอื่นๆ) ตอนนี้ ตัวเลขนี้สามารถปรับได้เพื่อให้ตัวระบุสี่อักขระทํางานได้ เช่น โดยไม่จําเป็นต้องปรับเปลี่ยนเพิ่มเติม
หากต้องการปรับความยาวสตริงขั้นต่ําสําหรับบาร์โค้ด / คิวอาร์โค้ด ให้กําหนดค่า ความยาวบาร์โค้ดขั้นต่ํา ใน CAPP เวอร์ชันท้องถิ่นใน การตั้งค่าทั่วไป - เครื่องสแกนบาร์โค้ด บาร์โค้ดที่สั้นกว่าความยาวที่ป้อนจะถูกละเว้นโดยระบบ
ข้อมูลรายการ
ส่วนนี้ของอินเทอร์เฟซ CAPP Capture ให้ข้อมูลพื้นฐานเกี่ยวกับรายการ และประกอบด้วย 3 ส่วนหลัก
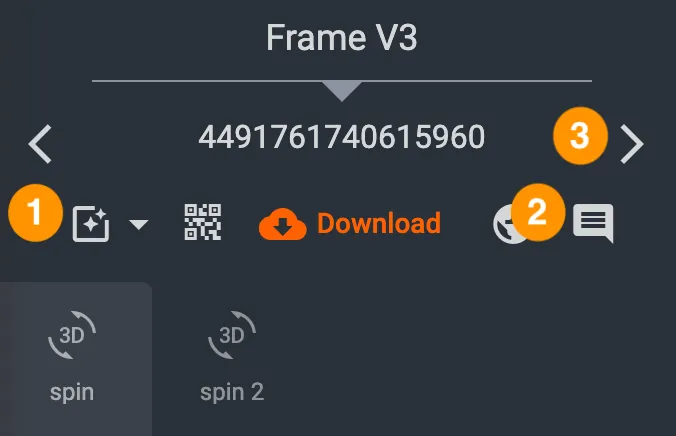
- สถานะการจับภาพ - สลับสถานะรายการเป็น จับภาพ, แก้ไขแล้ว, จับซ้ํา หรือแก้ไขการแก้ไข
- ความคิดเห็น - คลิกเพื่อเข้าถึงข้อคิดเห็นระดับรายการทั้งหมด
- ถัดไป / ก่อนหน้า - ใช้เพื่อนําทางระหว่างรายการตามตัวกรองสถานะรายการที่เลือก
โน้ต: หากสินค้ามีบาร์โค้ดที่ป้อนด้วยตนเองหรือสแกนเข้าสู่ระบบโดยอัตโนมัติพื้นที่ข้อมูลรายการจะแสดงปุ่มบาร์โค้ดด้วย การคลิกปุ่มบาร์โค้ดจะเป็นการเปิดหน้าต่างป๊อปอัปเพื่อแสดงบาร์โค้ดของสินค้า
ปลาย: ตั้งค่า ตัวกรองสถานะรายการ เพื่อจํากัดผลลัพธ์เพื่อค้นหาและนําทางโครงการได้อย่างรวดเร็ว
- กรองผลลัพธ์เพื่อแสดงเฉพาะรายการที่ทําเครื่องหมายไว้: ถูกบันทึก, แก้ไขแล้ว, ตรวจสอบแล้ว, อนุมัติ แล้ว หรือ ถูกปฏิเสธ
ตัวอย่างเช่น หากรับผิดชอบในการตรวจสอบรูปภาพ ให้จํากัดผลการค้นหาไว้ที่ "แก้ไขแล้ว" เพื่อค้นหาและตรวจสอบเฉพาะรายการที่ได้รับการประมวลผลภายหลังแล้วเท่านั้น หลังจากตรวจสอบแล้ว ให้ตั้งค่าสถานะรายการเป็น "ยืนยันแล้ว" หรือ "แก้ไขการแก้ไข" เพื่ออนุมัติหรือปฏิเสธการเปลี่ยนแปลงและแจ้งให้สมาชิกในทีมทราบ สถานะรายการจะแจ้งให้ฝ่ายที่รับผิดชอบทราบเมื่อภาพพร้อมสําหรับการเผยแพร่หรือเมื่อจําเป็นต้องแก้ไขเพิ่มเติม
โฟลเดอร์ เฟรม และรูปภาพ
แอสเซทวิชวลทั้งหมดจะถูกจัดระเบียบเป็นโฟลเดอร์ โดยโฟลเดอร์จะถูกแบ่งออกเพื่อแสดงเอาต์พุตประเภทต่างๆ โฟลเดอร์สามประเภทได้แก่:
- สปิน (360 / 3D)
- ภาพ นิ่ง
- วีดิทัศน์
แต่ละโฟลเดอร์มีแต่ละเฟรม เฟรมประกอบด้วยข้อมูลเกี่ยวกับมุมถ่ายภาพ (คําแนะนําสําหรับกระบวนการถ่ายภาพ) และรูปภาพหนึ่งหรือสองเวอร์ชัน:
- ต้นฉบับ - ไฟล์ต้นฉบับตามที่กล้องได้รับ
- แก้ไข -- ไฟล์ภาพที่ได้รับการแก้ไขผ่านทางเครื่องมือหลังการประมวลผลของ PhotoRobot
นําทางอินเทอร์เฟซโฟลเดอร์ดังนี้:
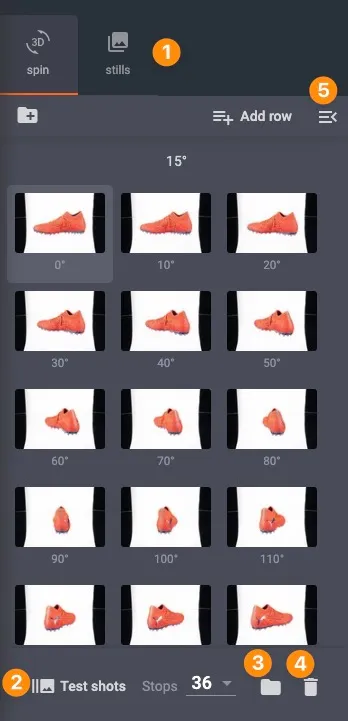
- เลือกระหว่างโฟลเดอร์ (1)
- ทดลองการกําหนดค่าโดยการถ่ายภาพทดสอบ (2)
- เปิดการจัดเก็บภาพบนคอมพิวเตอร์เฉพาะที่ (3)
- ภาพถ่ายที่ชัดเจนสําหรับการถ่ายภาพอีกครั้ง (4)
- เข้าถึง เมนูโฟลเดอร์* (5)
เมนูโฟลเดอร์ประกอบด้วยฟังก์ชันต่อไปนี้
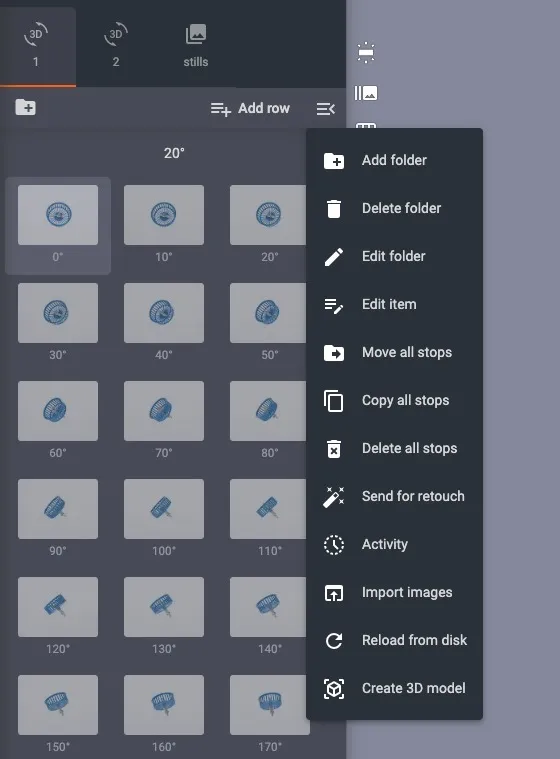
- เพิ่ม / ลบ / แก้ไขโฟลเดอร์
- คัดลอก / ย้ายเฟรมระหว่างโฟลเดอร์
- ลบเฟรม - ลบเฟรมทั้งหมดออกอย่างสมบูรณ์พร้อมกับรูปภาพและการกําหนดค่ามุมทั้งหมด
- ส่งเพื่อรีทัช - ทําเครื่องหมายรายการสําหรับการรีทัชภายนอก
- กิจกรรม - ดูบันทึกกิจกรรมของรายการ
- นําเข้าภาพ - อัปโหลดภาพของคุณเอง
- สร้างโมเดล 3 มิติ - สร้างโมเดล 3 มิติจากรูปภาพที่มีอยู่ในโฟลเดอร์ (*ใช้ได้เฉพาะบน MacOS ด้วยโมเดล 3 มิติที่รองรับ PhotoRobot หลายรูปแบบ)
นอกจากนี้ภายในแต่ละเฟรมยังมีตัวเลือกเมนูเพิ่มเติม:
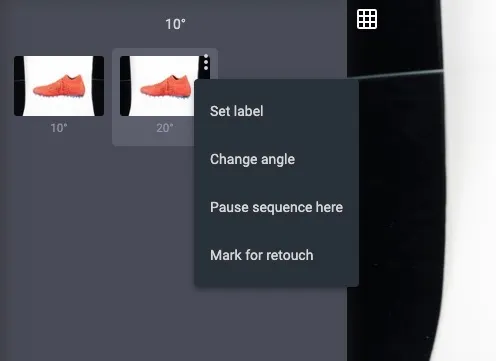
- ตั้งค่าป้ายกํากับ - สร้างป้ายกํากับสําหรับแต่ละเฟรม (เช่น "Hero Shot - front", "3 / 4", "back" หรือ GS1 แบบแผนการตั้งชื่อภาพ)
- เปลี่ยนมุม - ปรับมุมในแต่ละเฟรม
- หยุดลําดับภาพชั่วคราวที่นี่ - เลือกเพื่อหยุดลําดับการถ่ายภาพไว้ที่เฟรมนี้ชั่วคราวและรอให้ผู้ปฏิบัติงานถ่ายภาพต่อ
- ทําเครื่องหมายสําหรับการรีทัช - ระบุรูปภาพสําหรับการรีทัชภายนอกของบุคคลที่สาม
การควบคุมลําดับ
หากต้องการเริ่มลําดับ ให้กดปุ่มเล่น (1) ที่ด้านล่างของหน้าจอ:
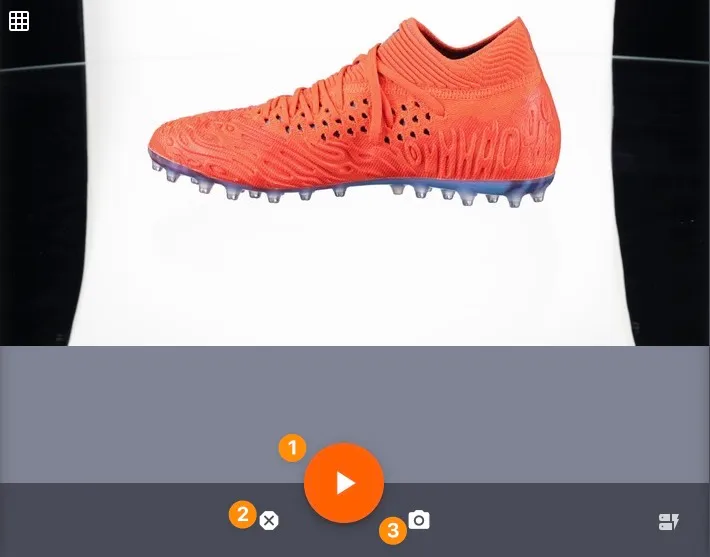
ขัดจังหวะลําดับงานเมื่อใดก็ได้ผ่านปุ่ม หยุดฉุกเฉิน (2)
ในโฟลเดอร์ภาพนิ่ง ให้ใช้ปุ่ม ถ่ายภาพสแนปช็อต (3) เพื่อจับภาพเฟรมโดยไม่ต้องกําหนดเฟรมก่อน สแนปชอตจะถูกบันทึกและรวมเป็นเฟรมใหม่ในโฟลเดอร์ภาพนิ่ง
ตัวเลือกลําดับ
ตามแผงด้านขวามือของอินเทอร์เฟซ CAPP ให้กําหนดค่าตัวเลือกลําดับ ตัวเลือกลําดับรวมถึง:
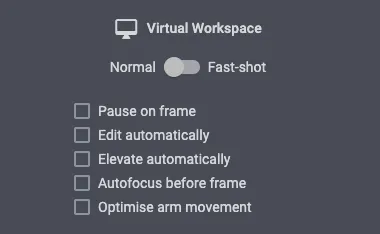
- การกําหนดค่าพื้นที่ทํางาน - เข้าถึงพื้นที่ทํางานหรือเปลี่ยนแปลงระหว่างแต่ละพื้นที่ทํางาน
- การสลับ Normal vs Fast-shot - กําหนดค่าให้หยุดการหมุนแผ่นเสียงชั่วคราวก่อนถ่ายภาพ (ปกติ) หรือเพื่อการจัดลําดับที่เร็วขึ้นอย่างมาก เพื่อถ่ายภาพระหว่างการหมุนแบบไม่หยุดนิ่ง (Fast-shot)
- หยุดชั่วคราวบนเฟรม - เปิดสวิตช์เพื่อสั่งการหมุนแผ่นเสียงเพื่อหยุดหลังจากแต่ละเฟรม (มีประโยชน์เมื่อสร้างภาพเคลื่อนไหวของผลิตภัณฑ์)
- แก้ไขโดยอัตโนมัติ - กําหนดค่าให้แก้ไขโดยอัตโนมัติทันทีหลังจากจับภาพ
- ยกระดับโดยอัตโนมัติ - เปิดใช้การยกระดับอัตโนมัติไปยังจุดศูนย์กลางของผลิตภัณฑ์ก่อนเริ่มลําดับ (โดยใช้มิติข้อมูลสินค้า)
- ปรับการเคลื่อนไหวของแขนให้เหมาะสม - หลังจากลําดับแขนจะยังคงอยู่ในตําแหน่งของแถวที่ถ่ายภาพล่าสุด ลําดับต่อไปนี้จะเริ่มจากตําแหน่งนี้
หมุน
ในโฟลเดอร์ Spin ให้ค้นหาตัวเลือกสําหรับภาพถ่ายผลิตภัณฑ์ 360 องศา
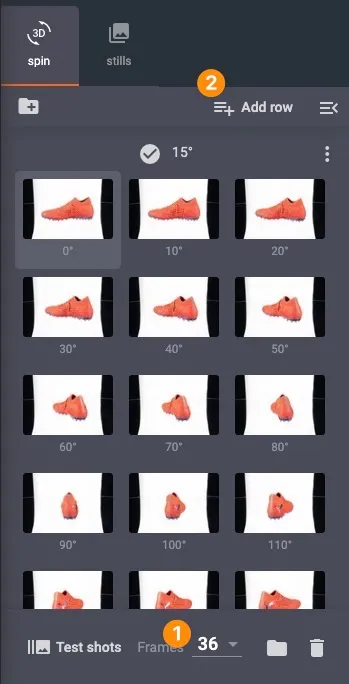
กําหนดค่า เฟรม (1) เพื่อเลือกจํานวนเฟรมที่จะจับภาพต่อการหมุน (เช่น 24, 36 เป็นต้น) ใช้ เพิ่มแถว (2) เพื่อระบุการจับภาพแถวเพิ่มเติมจากมุมสวิงอื่น (มุมแนวตั้งที่กล้องชี้ไปที่วัตถุ)
ภาพ นิ่ง
เมื่อต้องการกําหนดเฟรมที่จะจับภาพในโฟลเดอร์ภาพนิ่ง ให้ใช้ เพิ่มเฟรม ที่มุมขวาบนของอินเทอร์เฟซ

หรือกด ถ่ายภาพ เพื่อ ถ่ายภาพและสร้างเฟรมใหม่ที่สอดคล้องกันไปพร้อมๆ กัน เชื่อมต่อกล้องผ่าน WiFi เพื่อถ่ายภาพด้วยมือและเพิ่มเฟรมใหม่ (ภาพระยะใกล้, ภาพรายละเอียด) ไปยังโฟลเดอร์ภาพนิ่งโดยอัตโนมัติ
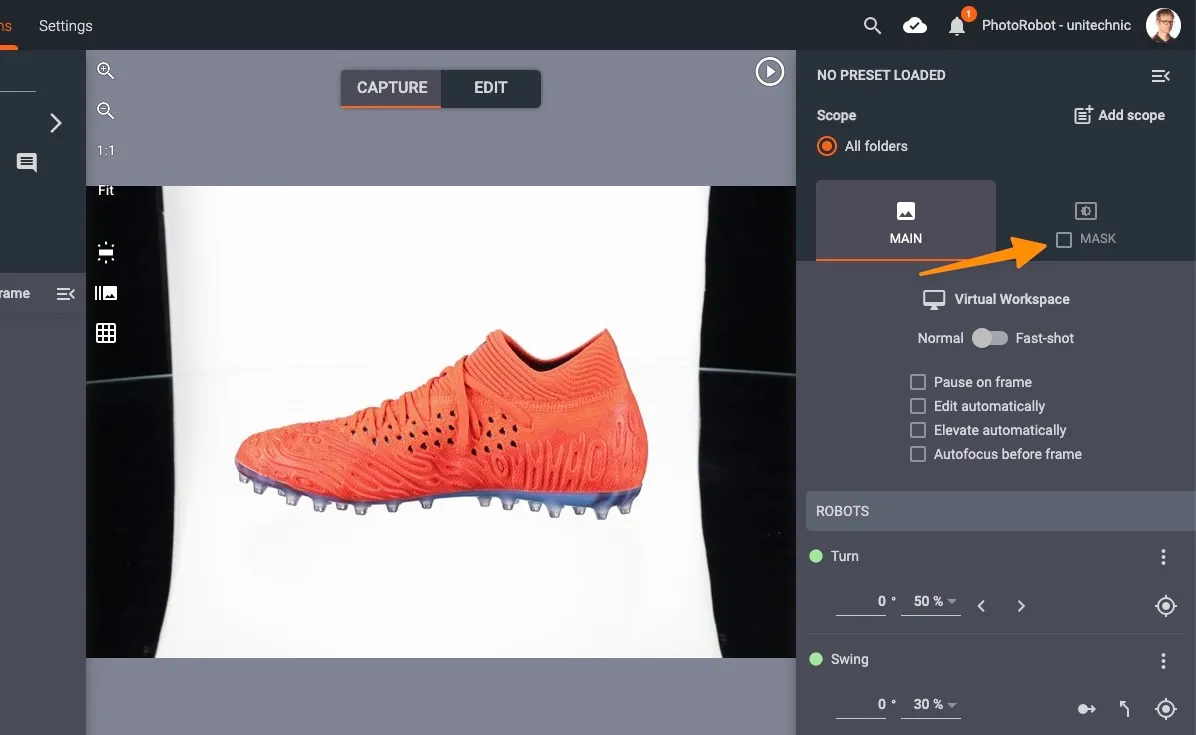
การลบพื้นหลัง Freemask
การลบพื้นหลัง Freemask เป็นกระบวนการที่จับภาพสองภาพสําหรับแต่ละเฟรม:
- ภาพหลัก - ภาพมาตรฐานของวัตถุ
- ภาพหน้ากาก - ภาพถ่ายของวัตถุที่สว่างจากด้านหลัง


ภาพทั้งสองนี้จะถูกประกอบเข้าด้วยกันเพื่อให้ได้ภาพถ่ายที่มีพื้นหลังถูกลบอย่างมีประสิทธิภาพรอบ ๆ วัตถุ:

หากต้องการเปิดใช้งาน Freemask ให้เลือกกล่องกาเครื่องหมาย หน้ากาก ที่แผงด้านขวามือ:
การกําหนดค่าฮาร์ดแวร์
หุ่น ยนต์
ขึ้นอยู่กับหุ่นยนต์ (หรือการรวมกันของหุ่นยนต์) มีการเคลื่อนไหวของหุ่นยนต์มากถึง 3 ประเภท และตัวเลือกการควบคุมสําหรับตําแหน่ง ความเร็ว และการสอบเทียบการเคลื่อนไหวแต่ละครั้ง:
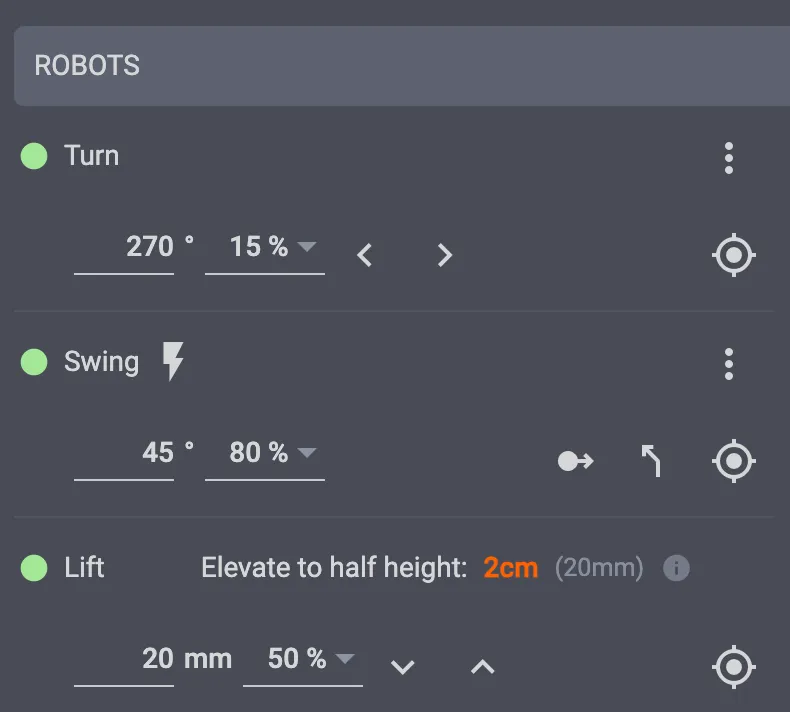
- เลี้ยว - มาตรฐานสําหรับอุปกรณ์PhotoRobotส่วนใหญ่ Turn ช่วยให้ผู้ใช้สามารถควบคุมการหมุนแผ่นเสียงรอบศูนย์ได้
- สวิง - กําหนดค่ามุมแนวตั้งที่กล้องกําหนดเป้าหมายวัตถุ (เช่น ที่ 0° เพื่อรักษาระดับด้วยแผ่นเสียงที่ 90° สําหรับมุมมองด้านบนที่มองเห็นผลิตภัณฑ์)
- ยก - ตั้งค่าระดับความสูงของกล้อง
ค้นหาการตั้งค่าตําแหน่ง ความเร็ว และการสอบเทียบภายในตัวเลือกที่กําหนดค่าได้สําหรับการเลี้ยว สวิง และยก:
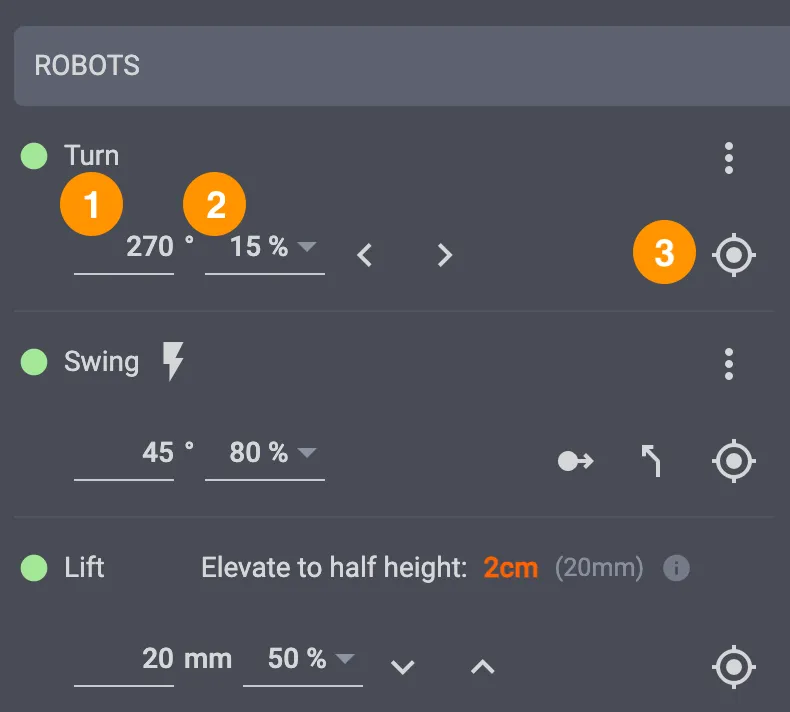
- ใช้สถานะ ตั้งค่าตําแหน่ง (1) เพื่อย้ายหุ่นยนต์
- กําหนดค่าความเร็วของการเคลื่อนที่โดยใช้อินพุต ความเร็ว (2)
- ใช้ปุ่ม การปรับเทียบ (3) เพื่อตั้งค่าหุ่นยนต์ไปที่ตําแหน่งเริ่มต้น
หากกําหนดค่าการเคลื่อนไหวเป็นครั้งแรก ให้ตั้งค่าหุ่นยนต์ไปที่ตําแหน่งเริ่มต้นผ่านการสอบเทียบเสมอ
นอกจากนี้ ตั้งแต่ CAPP เวอร์ชัน 2.13.3 ยังมีค่าที่ตั้งไว้ล่วงหน้าของมุมด่วนที่กําหนดค่าได้สําหรับการเลี้ยวและสวิงบนอินเทอร์เฟซโหมดจับภาพ คลิกจุดแนวตั้งสามจุดถัดจากช่อง Turn / Swing แล้วคลิก กําหนดค่ามุมที่ตั้งไว้ล่วงหน้า
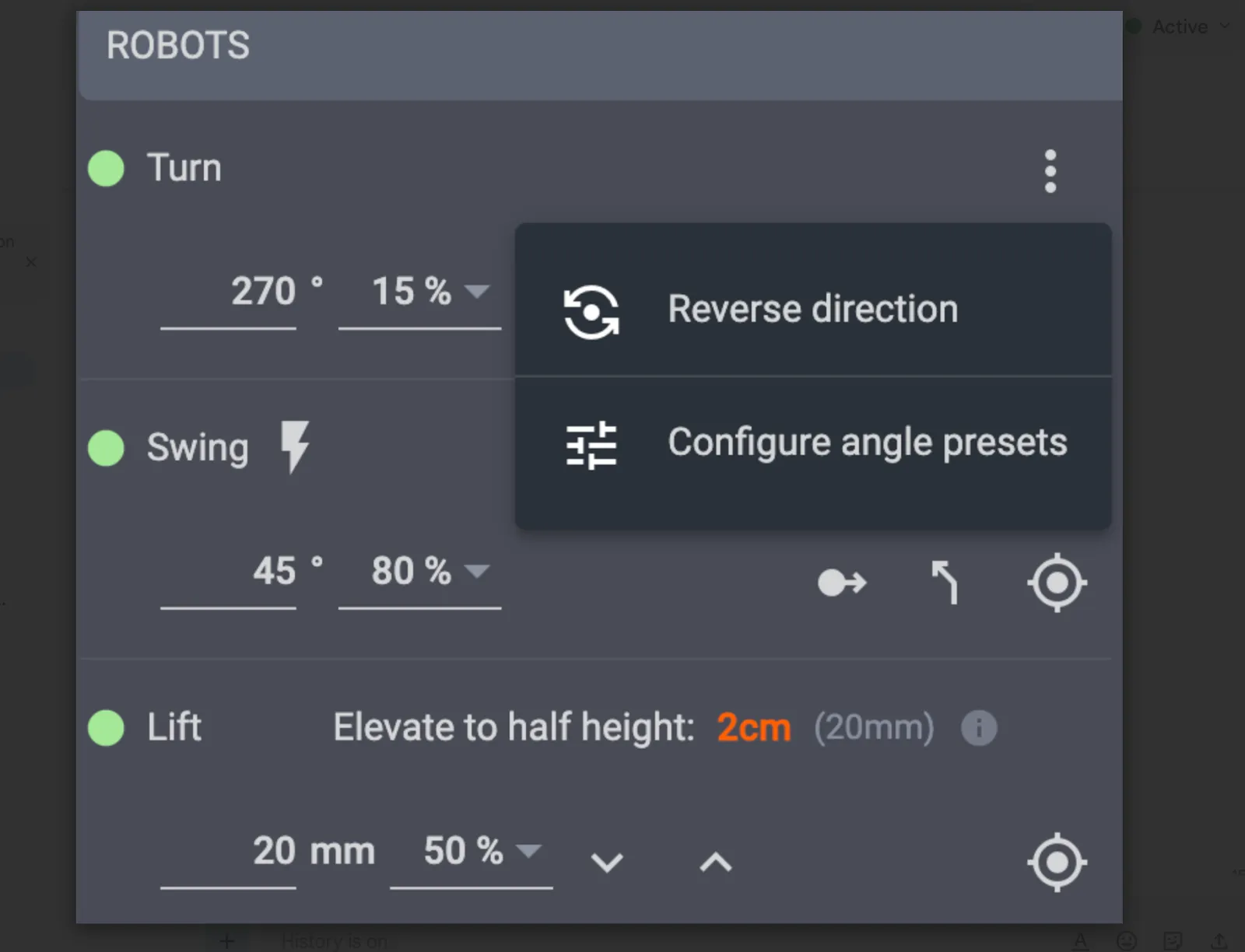
การดําเนินการนี้จะเปิดหน้าต่างป๊อปอัปเพื่อให้ผู้ใช้ป้อนมุมเลี้ยวหรือมุมสวิงที่ต้องการโดยคั่นด้วยเครื่องหมายจุลภาค (สูงสุด 4) เช่น 0, 90, 180, 270
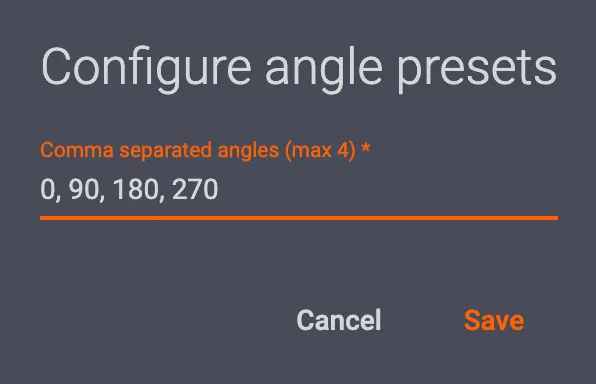
การคลิกบันทึกจะใช้มุมสวิง / มุมเลี้ยวที่ตั้งไว้ล่วงหน้าเพื่อจับภาพกับการตั้งค่าหุ่นยนต์

กล้อง
เปิดใช้งานกล้องหนึ่งตัวหรือหลายตัวสําหรับลําดับผ่านอินเทอร์เฟซกล้อง:

คลิกที่ไอคอน Live View (1) เพื่อเปิดใช้งานการเลือกจุดโฟกัสด้วยการคลิกในภาพ Live View แยกกล้องออกจากลําดับผ่านไอคอน ยกเว้นกล้อง (2) กล้องที่ยกเว้นใด ๆ จะไม่เรียกใช้ในระหว่างลําดับ โดยทั่วไปแล้วสิ่งนี้มีประโยชน์เมื่อผู้ใช้มีกล้องพิเศษที่เชื่อมต่อผ่าน WiFi เพื่อถ่ายภาพด้วยมือควบคู่ไปกับการหมุนและภาพนิ่งที่กําหนดไว้ล่วงหน้า
หมายเหตุ: โปรดดูคู่มือสนับสนุน PhotoRobot เรื่อง การกำหนดค่ากล้อง สำหรับข้อมูลเพิ่มเติม
ไฟ
CAPP รองรับทั้งไฟแฟลช (Broncolor หรือ FOMEI) และไฟ LED ใดๆ ที่รองรับ DMX สำหรับคำแนะนำเกี่ยวกับวิธีการติดตั้ง & กำหนดค่าไฟใน CAPP โปรดดูคู่มือ PhotoRobot ในหัวข้อ การตั้งค่าพื้นที่ทำงาน
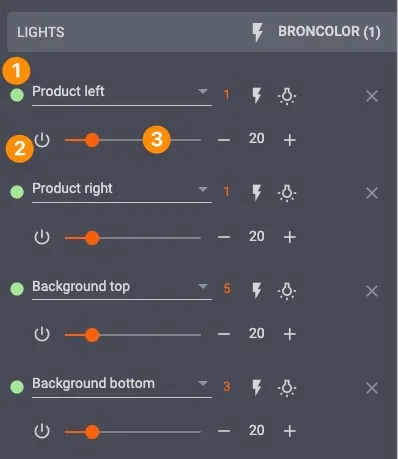
ในอินเทอร์เฟซ CAPP Lights ให้กําหนดตําแหน่งไฟแต่ละดวงผ่านเมนู ตําแหน่งแสง (1) ใช้เมนูแบบเลื่อนลงเลือกตําแหน่งที่กําหนดเองหรือหนึ่งในตําแหน่งที่กําหนดไว้ล่วงหน้า ตําแหน่งที่กําหนดไว้ล่วงหน้าได้แก่:
- ผลิตภัณฑ์ด้านซ้าย / ด้านขวาของผลิตภัณฑ์ - ไฟที่อยู่ในตําแหน่งเพื่อให้แสงสว่างแก่ผลิตภัณฑ์จากด้านหน้า
- พื้นหลังด้านบน / พื้นหลังด้านล่าง - ไฟส่องสว่างพื้นหลังจากด้านหลังเพื่อสร้างพื้นหลังสีขาว
หากต้องการกําหนดตําแหน่งที่กําหนดเอง ให้เลือก ตําแหน่งแบบกําหนดเอง จากตัวเลือกรายการตําแหน่ง
เปิดหรือปิดไฟผ่านปุ่ม เปิด/ปิด (2) สิ่งนี้มีประโยชน์เช่นสําหรับวิธีการ freemask ซึ่งจําเป็นต้องปิดไฟหน้าเพื่อถ่ายภาพหน้ากาก
เลื่อนแถบเลื่อน ความเข้มของแสง (3) จากซ้ายไปขวาเพื่อให้แสงสว่างมืดลงหรือสว่างขึ้น หมายเหตุ: ไฟที่ควบคุมด้วย DMX บางรุ่นยังให้การควบคุมอุณหภูมิสีอีกด้วย
ขอบเขตและค่าที่ตั้งไว้ล่วงหน้า
ตามค่าเริ่มต้น การกําหนดค่าฮาร์ดแวร์จะเหมือนกันในทุกโฟลเดอร์ภายในรายการ
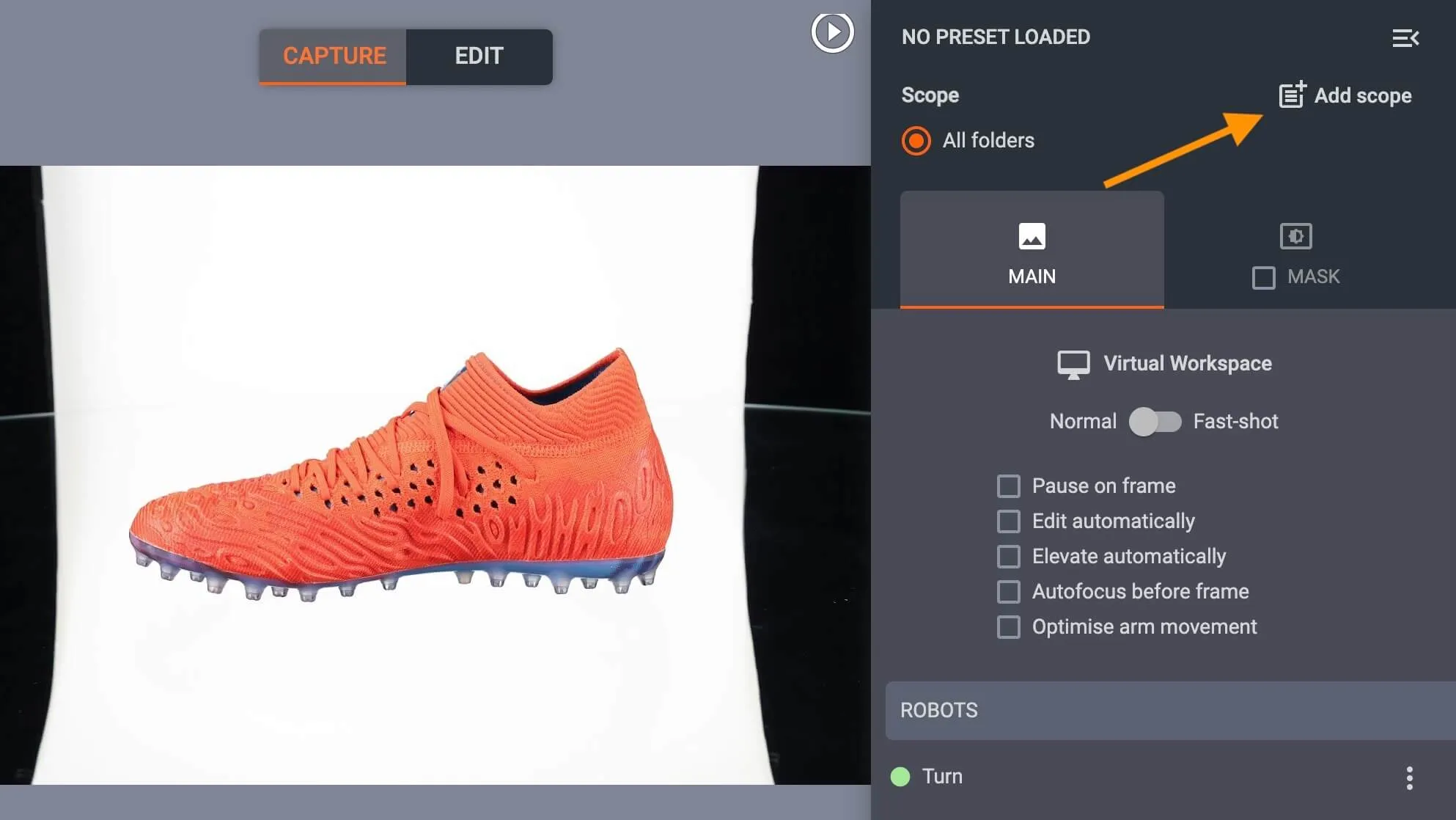
เมื่อต้องการกําหนดการตั้งค่าฮาร์ดแวร์เอง (ตามโฟลเดอร์หรือตามแถว) ให้ใช้ปุ่ม เพิ่มขอบเขต :
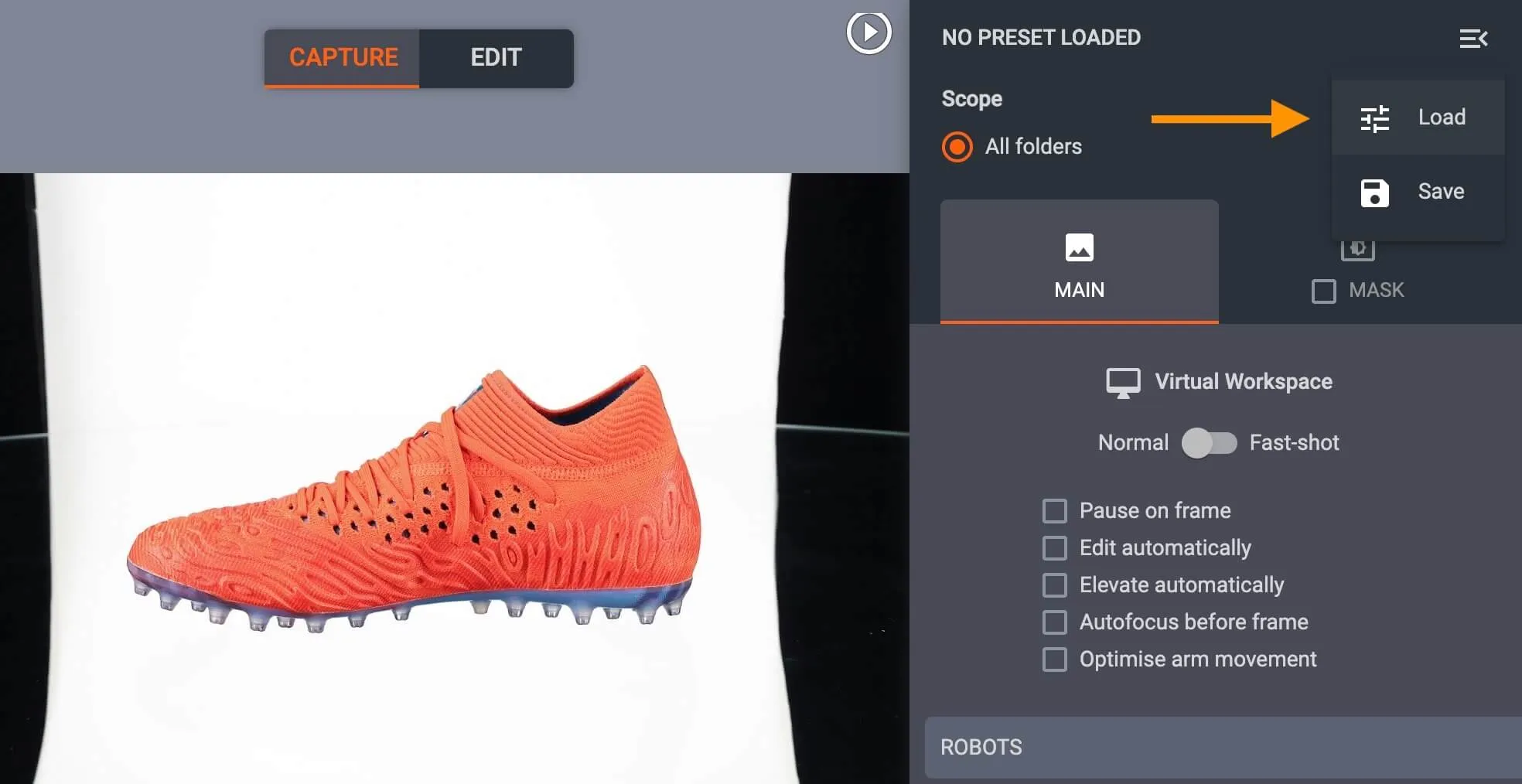
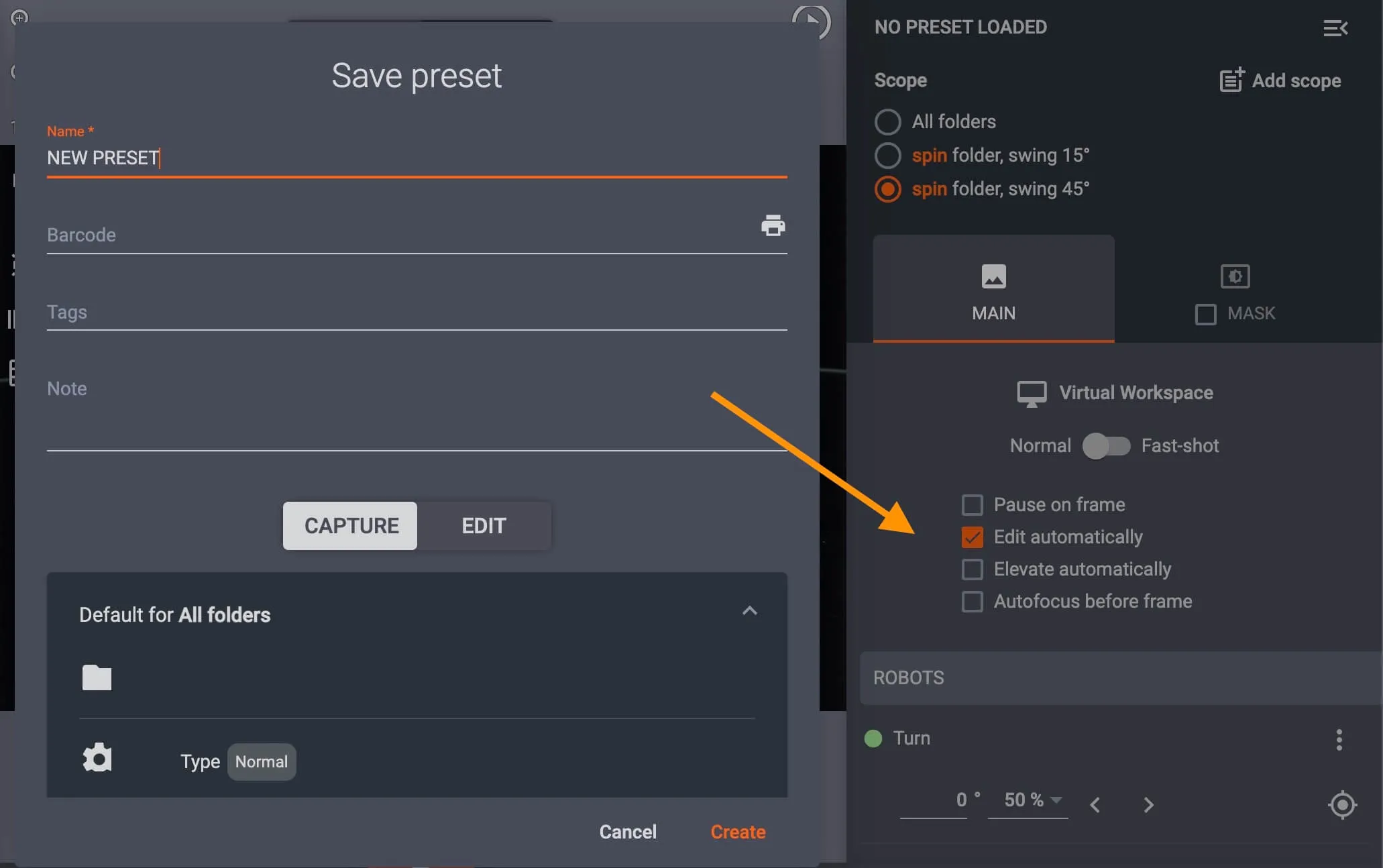
หลังจากปรับแต่งการกําหนดค่าแล้ว ให้โหลดหรือบันทึกการตั้งค่าที่มุมขวาบนผ่านเมนูแบบเลื่อนลงสําหรับพรีเซ็ต:
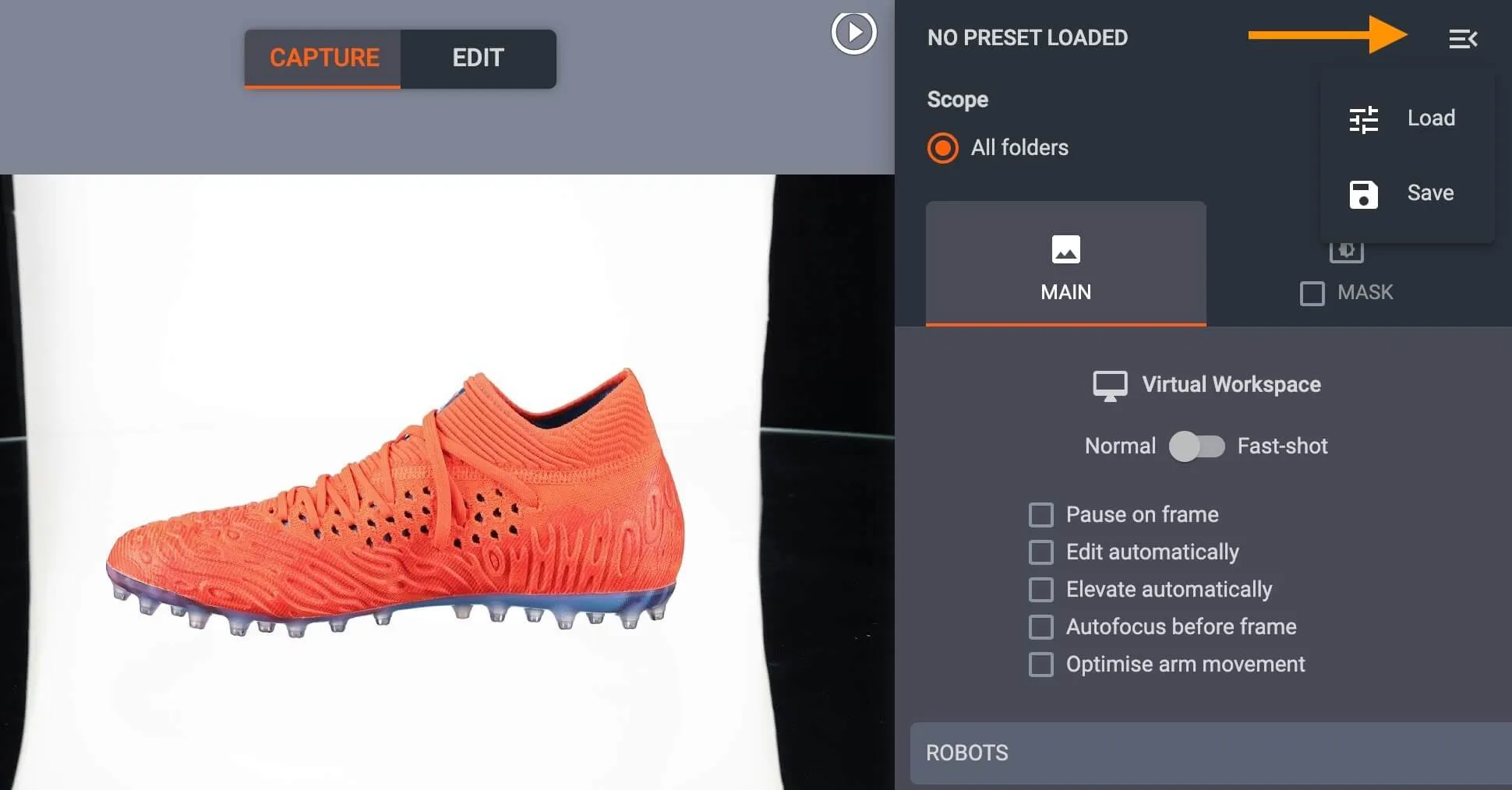
- คลิกไอคอนไฟล์เพื่อบันทึกการตั้งค่าการจับภาพทั้งหมด และโหลดการกําหนดค่าในภายหลังเพื่อนํากลับมาใช้ใหม่ในการถ่ายภาพที่คล้ายกัน
กําหนดพรีเซ็ต
ใน CAPP มี 3 วิธีในการโหลด / กําหนดพรีเซ็ตสําหรับรายการหรือหลายรายการ
1. เลือกรายการและโหลด Preset ผ่านไอคอนเมนูแบบเลื่อนลงที่ส่วนบนขวาของอินเทอร์เฟซ:
- อีกทางเลือกหนึ่ง ใช้ปุ่มลัด “P” เพื่อเปิด Presets ที่บันทึกไว้ จากนั้น เลือกการกำหนดค่าเพื่อนำไปใช้กับรายการ ซึ่งจะสร้างโฟลเดอร์สำหรับเฟรมที่จะถ่าย พร้อมกับการตั้งค่าการจับภาพทั้งหมดและการดำเนินการแก้ไขที่กำหนดไว้ล่วงหน้า
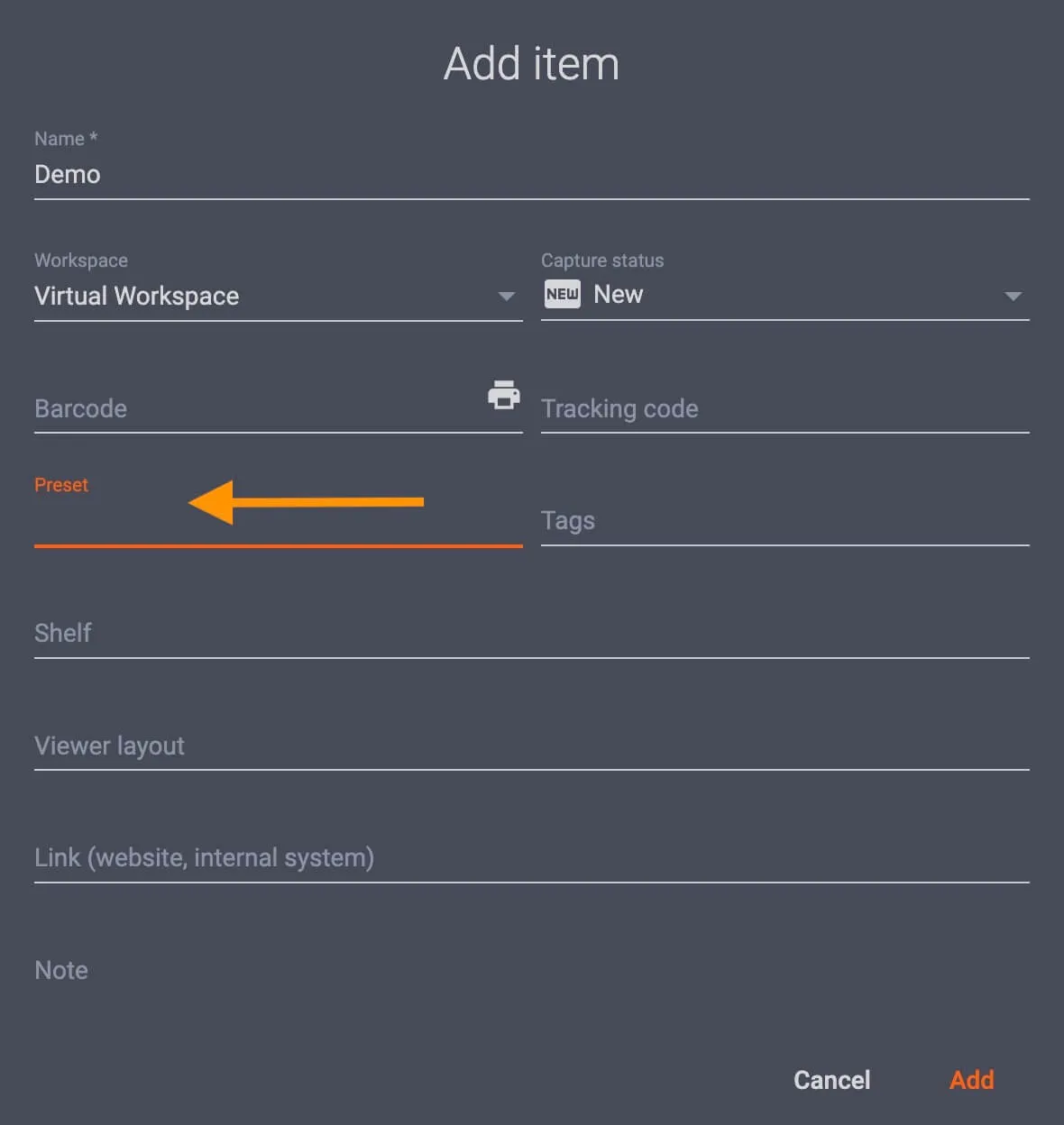
2. เมื่อสร้างรายการ ผู้ใช้สามารถเลือกการกำหนดค่าผ่านเมนูเพิ่มรายการโดยคลิกที่ช่อง Preset
- หากต้องการกําหนดค่าที่ตั้งไว้ล่วงหน้าให้กับหลายรายการ ให้เลือกรายการจากเมนูรายการ แล้วคลิก กําหนดค่าที่ตั้งไว้ล่วงหน้า:
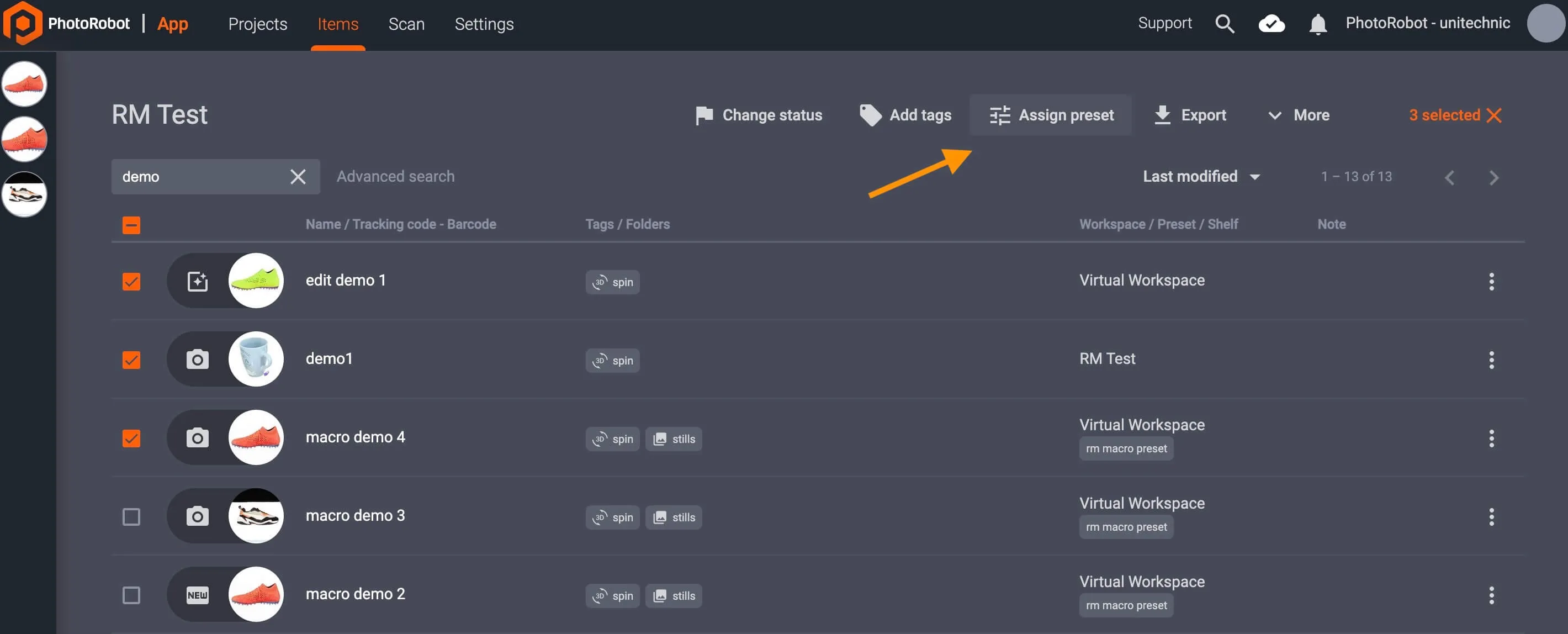
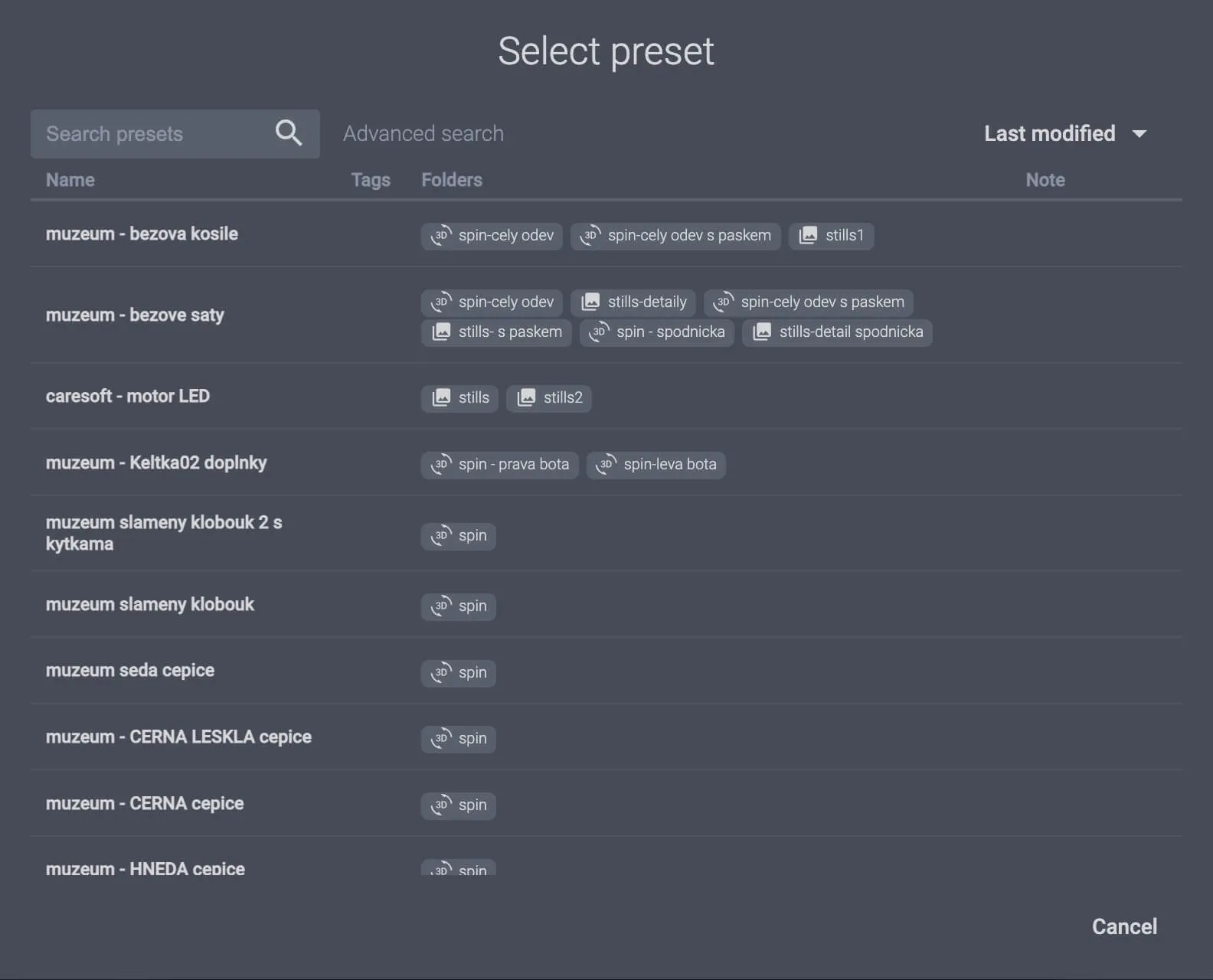
- เลือกค่าที่ตั้งไว้ล่วงหน้าตามชื่อ และกําหนดให้กับรายการโดยคลิก กําหนดค่าที่ตั้งไว้ล่วงหน้า อีกครั้ง:

3. หรือในเมนูรายการคลิกนําเข้าเพื่อ นําเข้า รายการจาก CSV:
- ฟังก์ชันการนําเข้า CSV ช่วยให้ผู้ใช้ PhotoRobot สามารถสร้างรายการที่มีการกําหนดค่าใน Excel เพื่อนําเข้าไปยังระบบ
- ไฟล์ CSV อาจมีคอลัมน์ที่ปรับแต่งได้ต่อไปนี้และหนึ่งฟังก์ชันเพื่อกําหนดค่าที่ตั้งไว้ล่วงหน้าด้วยชื่อที่ตั้งไว้ล่วงหน้าให้กับรายการ:
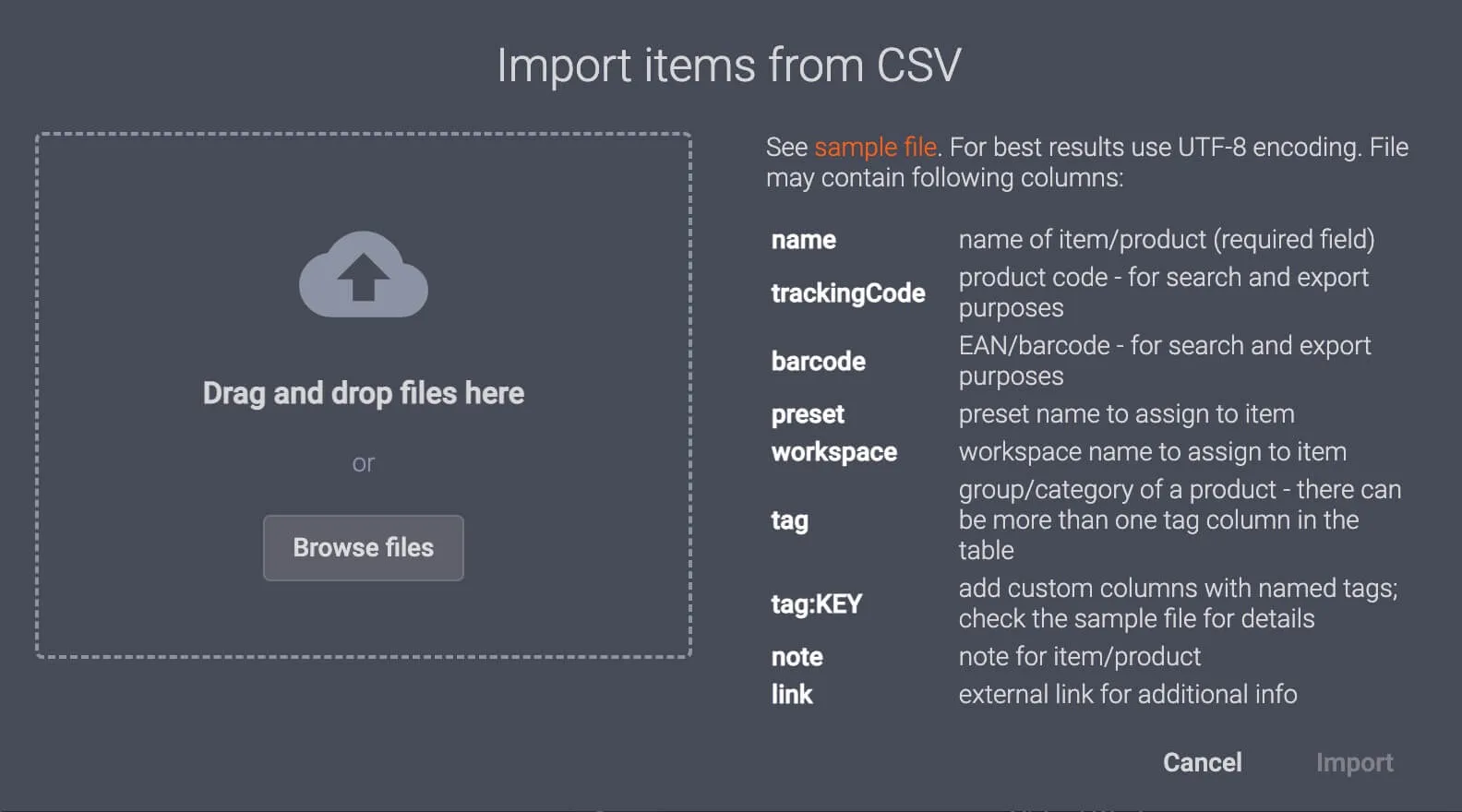
( ! ) - หมายเหตุ: เมื่อใช้การนําเข้า CSV แนะนําให้ใช้การเข้ารหัส UTF-8 เพื่อผลลัพธ์ที่ดีที่สุด
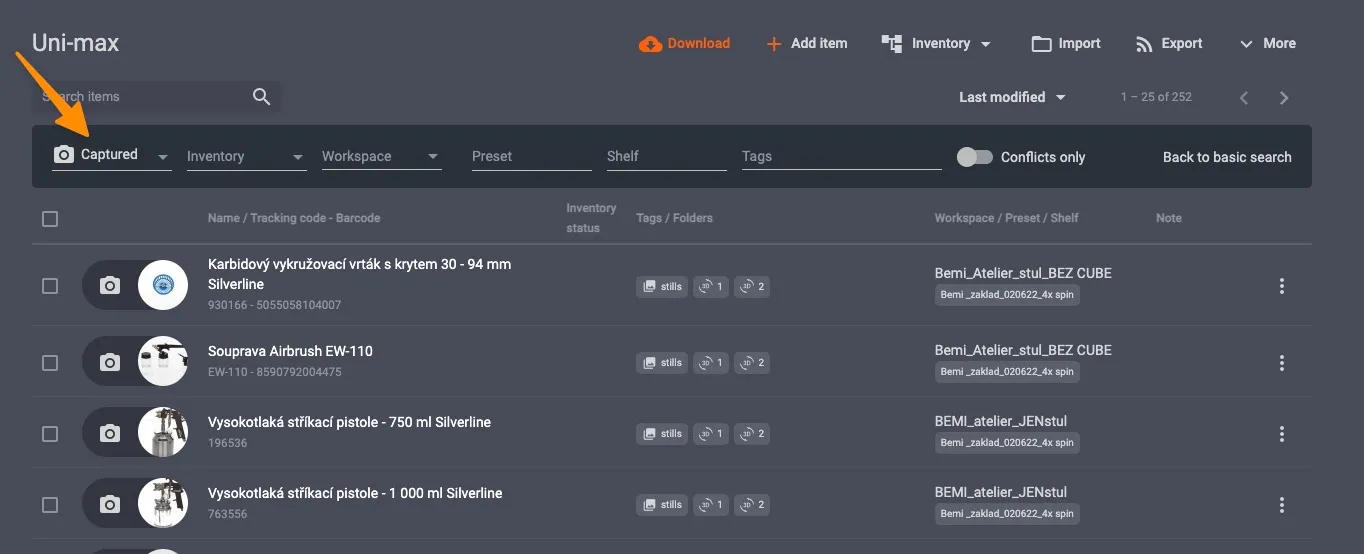
การจัดเรียงสิ่งของไปยังชั้นวาง (รถเข็น)
นอกจากนี้ ใน CAPP การจัดเรียงรายการไปยัง ชั้นวาง (หรือ รถเข็น) ช่วยให้คุณสามารถลดความซับซ้อนของเวิร์กโฟลว์โดยการตั้งค่าพื้นที่ทํางานและค่าที่ตั้งไว้ล่วงหน้าโดยอัตโนมัติหลังจากกําหนดชั้นวางให้กับรายการ
การสร้างรหัสชั้นวาง (หรือรถเข็น) ในระบบจะช่วยจัดเรียงรายการออกเป็นหมวดหมู่ด้วยการตั้งค่าการถ่ายภาพที่กําหนดค่าได้ เป็นไปได้ที่จะกําหนดชั้นวางให้กับสินค้าโดยกําหนดการตั้งค่าในแอป หรืออีกทางหนึ่งคือการรวม CAPP ของการสนับสนุนเครื่อง อ่านบาร์โค้ด
การสนับสนุนเครื่องอ่านบาร์โค้ดช่วยให้ทีมสามารถ พิมพ์บาร์โค้ดที่ไม่ซ้ํากัน ซึ่งพวกเขาสามารถสแกนเพื่อกําหนดรายการไปยังชั้นวางได้ ด้วยวิธีนี้ ทีมสามารถสแกนรหัสชั้นวาง จากนั้นสแกนรายการเพื่อกําหนดการตั้งค่าการถ่ายภาพได้อย่างรวดเร็วโดยไม่ต้องคลิกเมาส์ หรือย้ายไปยังคอมพิวเตอร์เวิร์กสเตชัน
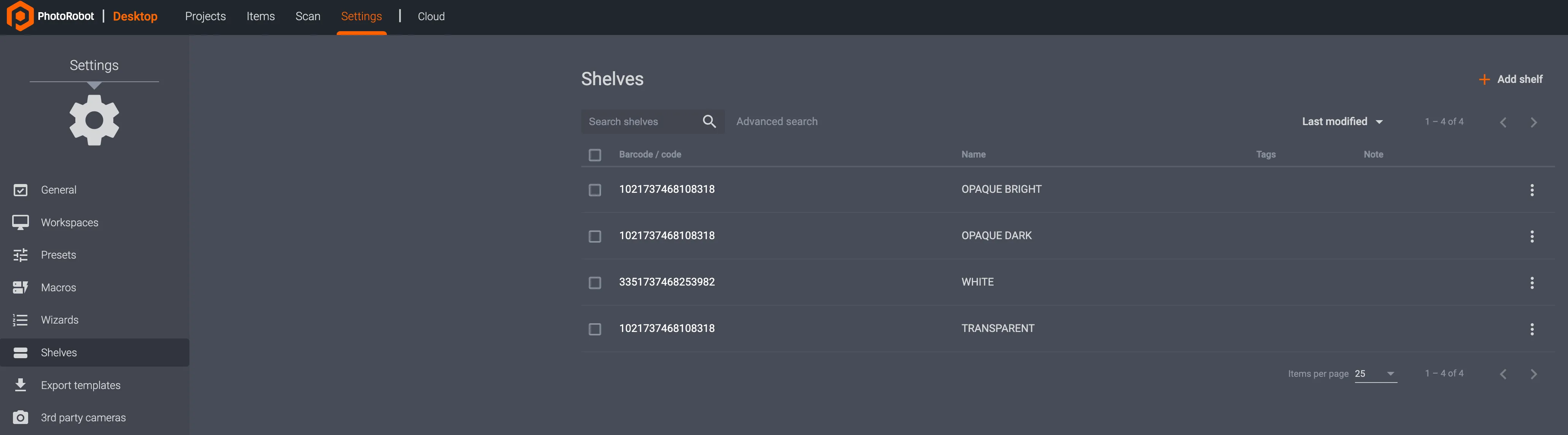
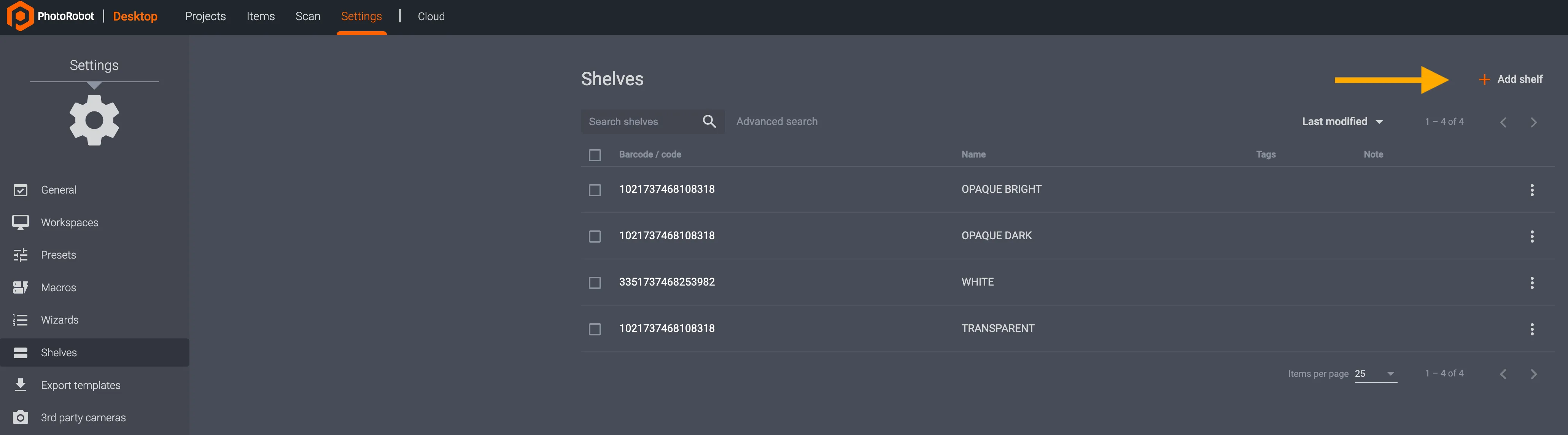
หากต้องการเข้าถึงการตั้งค่า ชั้นวาง ใน CAPP ให้เปิด การตั้งค่า ในแอปเวอร์ชันภายในเครื่องหรือระบบคลาวด์:
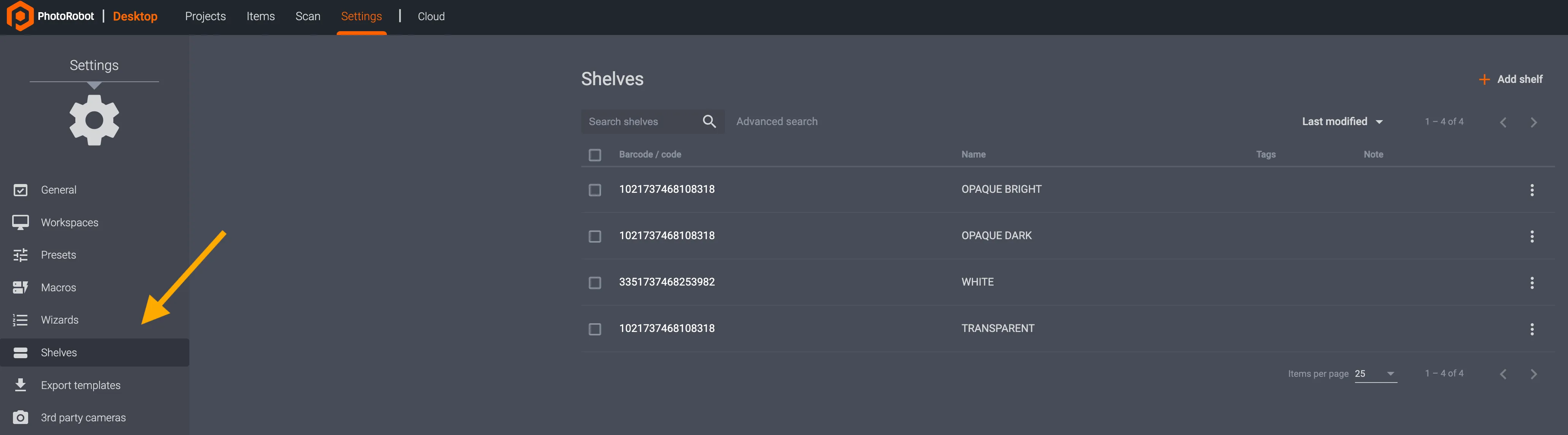
- คลิกรายการเมนูชั้นวาง ทาง ด้านซ้ายมือของอินเทอร์เฟซการตั้งค่าเพื่อ view ชั้นวางที่บันทึกไว้ (ถ้ามี)
- ค้นหาชั้นวางผ่านการค้นหาขั้นสูง หรือเลือกชั้นวางผ่านช่องทางด้านซ้ายของบาร์โค้ด/รหัสชั้นวาง
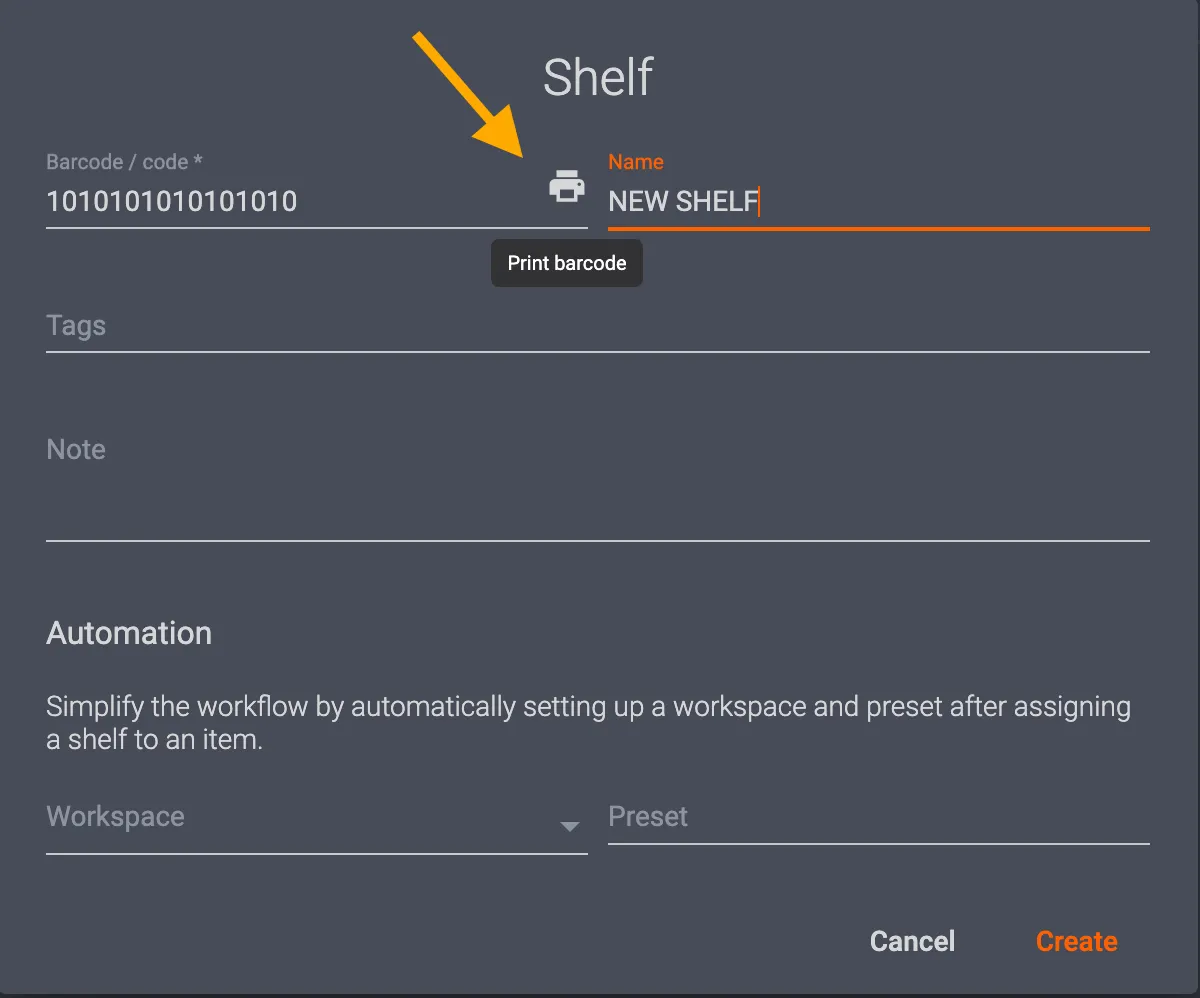
หากต้องการสร้างชั้นวางใหม่ ให้ใช้ + เพิ่มชั้นวางที่ มุมขวาบนของเมนูชั้นวาง
การตั้งค่าชั้นวางใหม่จะเปิดใช้งานการสร้างบาร์โค้ด / รหัสที่กําหนดเองเพื่อใช้กับเครื่องอ่านบาร์โค้ด การสร้างชื่อ แท็ก โน้ต พื้นที่ทํางาน และการเลือกที่ตั้งไว้ล่วงหน้า
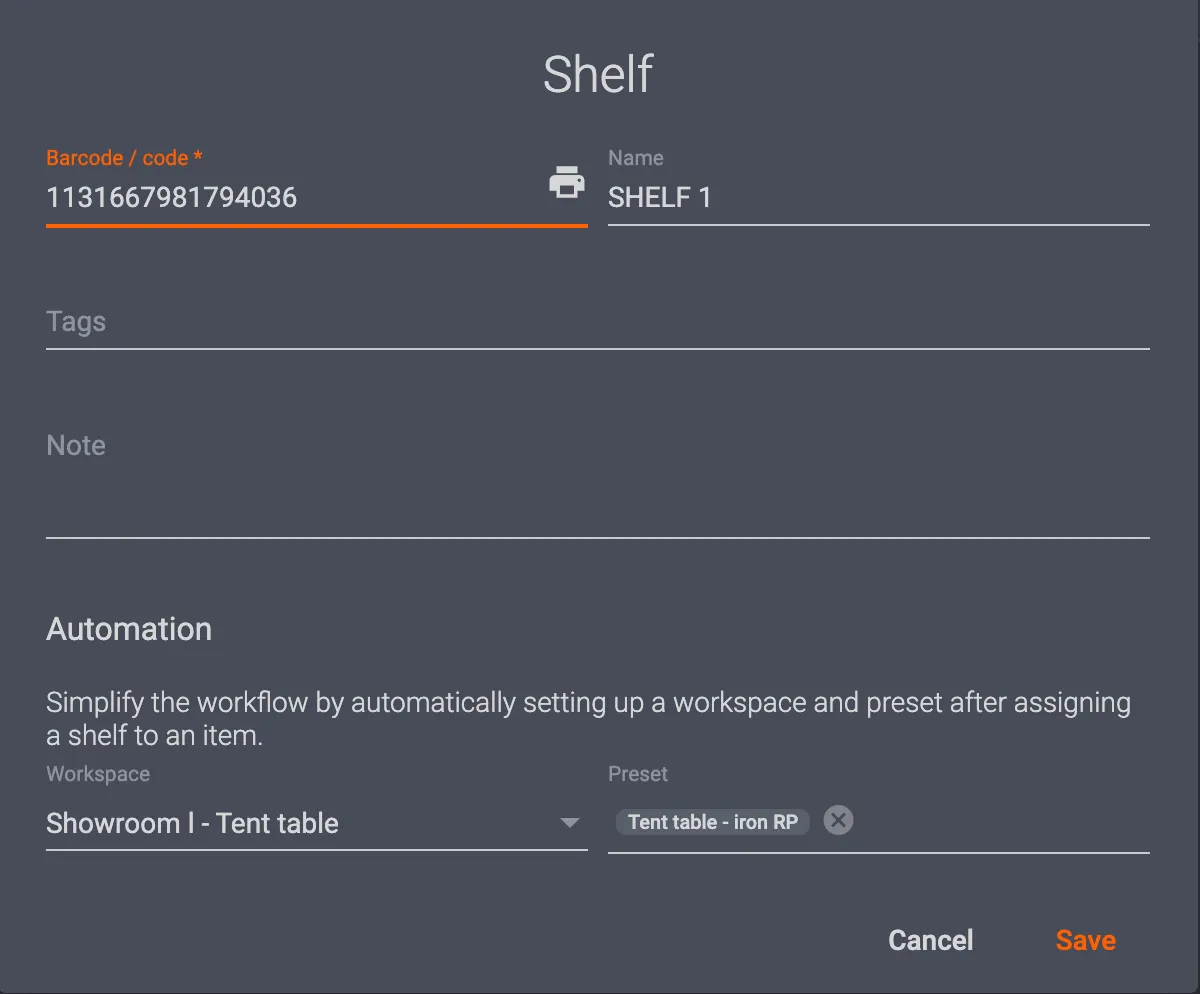
- บาร์โค้ด / รหัส สามารถปรับแต่งเพื่อสร้างรหัสชั้นวางที่ไม่ซ้ํากันซึ่งระบบสามารถใช้เพื่อกําหนดการตั้งค่าผ่านเครื่องอ่านบาร์ โค้ด
- ชื่อ มักใช้เพื่อแยกแยะประเภทของวัตถุที่กําลังถ่ายภาพ เช่น สิ่งของขนาดเล็ก กลาง และใหญ่ รองเท้า เทียบกับเครื่องประดับ เสื้อผ้า หรือวัตถุประเภทอื่นที่คล้ายคลึงกัน
- จากนั้นฟิลด์พื้นที่ทํางานและที่ตั้งไว้ล่วงหน้าสามารถกําหนดค่าได้โดยเวิร์กสเตชันหุ่นยนต์ (และตําแหน่งในสตูดิโอ) และฟิลด์ที่ตั้งไว้ล่วงหน้าสําหรับการตั้งค่าการจับภาพอัตโนมัติและหลังการประมวลผลของชั้นวาง
- บันทึก ที่มุมล่างขวาของอินเทอร์เฟซจะสร้างชั้นวางในระบบสําหรับการกําหนดในอนาคตผ่านแอพหรือผ่านเครื่องอ่านบาร์โค้ด
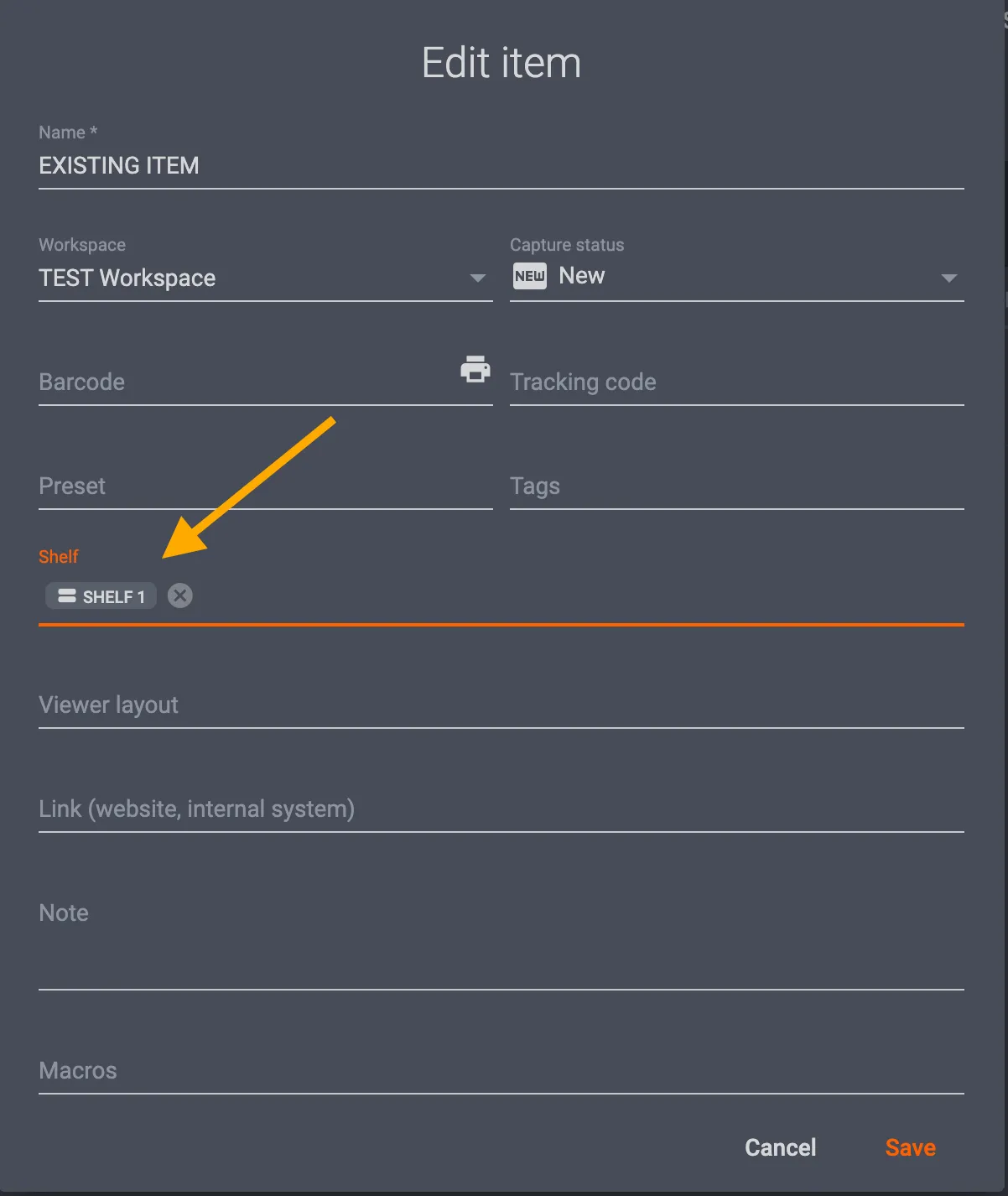
หลังจากนั้น หากต้องการกําหนดรหัสชั้นวางให้กับรายการใหม่หรือที่มีอยู่ในแอป ให้เลือกฟิลด์ ชั้นวาง ในเมนู การตั้งค่ารายการ แล้วเลือก ชั้นวาง เพื่อกําหนดให้กับสินค้า:
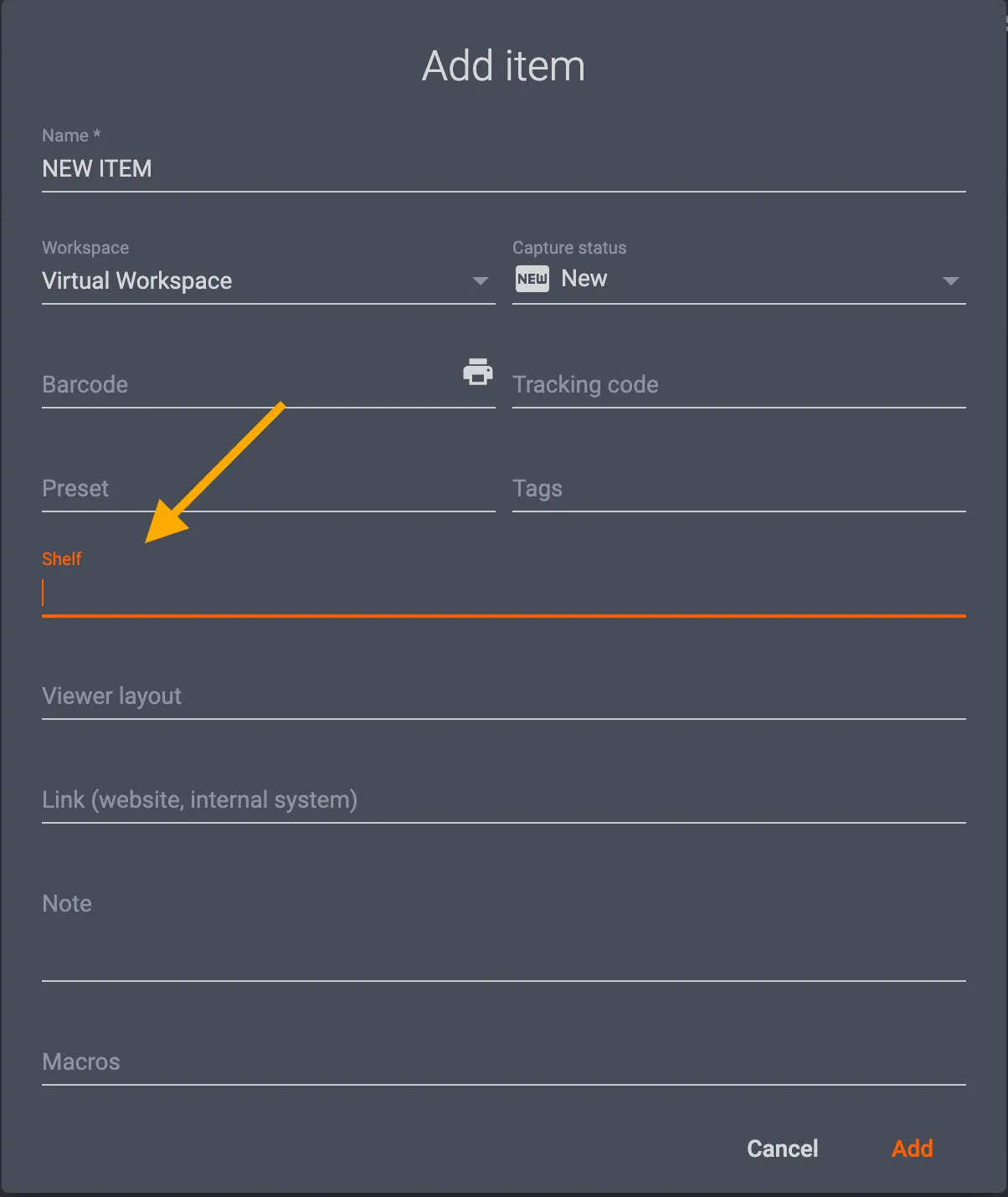
หมายเหตุ: กระบวนการจะใช้ชั้นวางกับสินค้าที่มีอยู่เพื่อจับภาพในระบบจะเหมือนกัน เพียงเลือกการตั้งค่ารายการ และกําหนดค่าฟิลด์ ชั้นวาง:
อีกวิธีหนึ่งคือหากใช้เครื่องอ่านบาร์โค้ดในตัว ให้พิมพ์รหัสชั้นวางที่ไม่ซ้ํากัน และใช้ควบคู่ไปกับบาร์โค้ดสินค้าเพื่อจัดระเบียบผลิตภัณฑ์และรายการถ่ายภาพของคุณอย่างรวดเร็วตามเวิร์กสเตชันและค่าที่ตั้งไว้ล่วงหน้า

เพิ่มขอบเขตการตั้งค่า การดําเนินงาน
โดยหลักแล้วการกําหนดขอบเขตการตั้งค่าจะสั่งให้ระบบบันทึกโฟลเดอร์ที่จะบันทึกภาพที่ถ่ายลงในเฟรมที่จะจับภาพและการตั้งค่าสําหรับกระบวนการจับภาพ การตั้งค่าขอบเขตยังรวมถึงการกําหนดค่าลําดับ (โหมดปกติเทียบกับโหมดถ่ายภาพเร็ว) ความเร็วของหุ่นยนต์การตั้งค่ากล้องการควบคุมแสงและการดําเนินการแก้ไขที่กําหนดไว้ล่วงหน้า
ก่อนถ่ายภาพรายการผู้ใช้จะสร้างหรือกําหนดพรีเซ็ตในระบบ การตั้งค่าของ Preset สามารถนําไปใช้กับทั้งโฟลเดอร์รายการเฉพาะหรือในแต่ละแถวและเฟรม (ในโหมดแก้ไข)
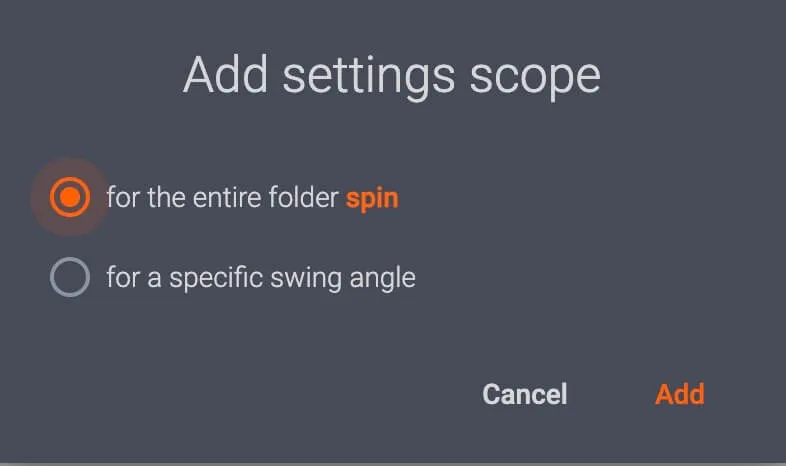
- เลือกขอบเขตการตั้งค่าสําหรับ การหมุนโฟลเดอร์ทั้งหมดสําหรับ มุมแกว่งเฉพาะหรือ สําหรับภาพปัจจุบัน เท่านั้น (โหมดแก้ไขเท่านั้น)
- ขอบเขตการตั้งค่าแต่ละรายการประกอบด้วยการกําหนดค่าฮาร์ดแวร์การตั้งค่าการจับภาพและการดําเนินการแก้ไขอย่างน้อยหนึ่งรายการ
เพิ่มขอบเขตการตั้งค่าสําหรับมุมสวิงเฉพาะ
หากใช้การตั้งค่าขอบเขตสําหรับมุมสวิงเฉพาะให้ระบุมุมที่จะใช้ค่าที่ตั้งไว้ล่วงหน้าในการจับภาพ (เช่น 15 °, 45 ° ฯลฯ ):
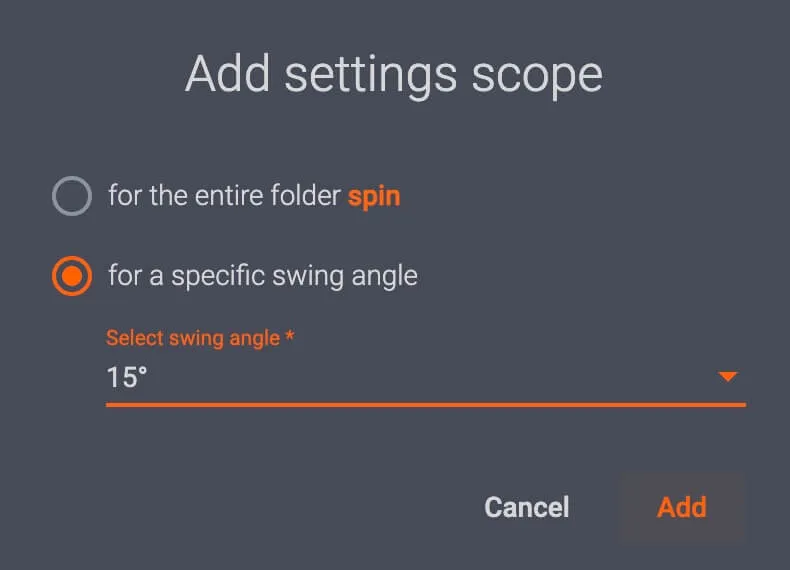
- ขอบเขตการตั้งค่าสามารถนําไปใช้กับมุมแกว่งอย่างน้อยหนึ่งมุมผ่าน เลือกมุมแกว่ง ระบุมุมแกว่ง แล้วคลิก เพิ่ม เพื่อกําหนดการตั้งค่าขอบเขตให้กับโฟลเดอร์
- โฟลเดอร์เป้าหมายที่มีพรีเซ็ตที่กําหนดจะแสดงที่ส่วนบนขวาของอินเทอร์เฟซ:
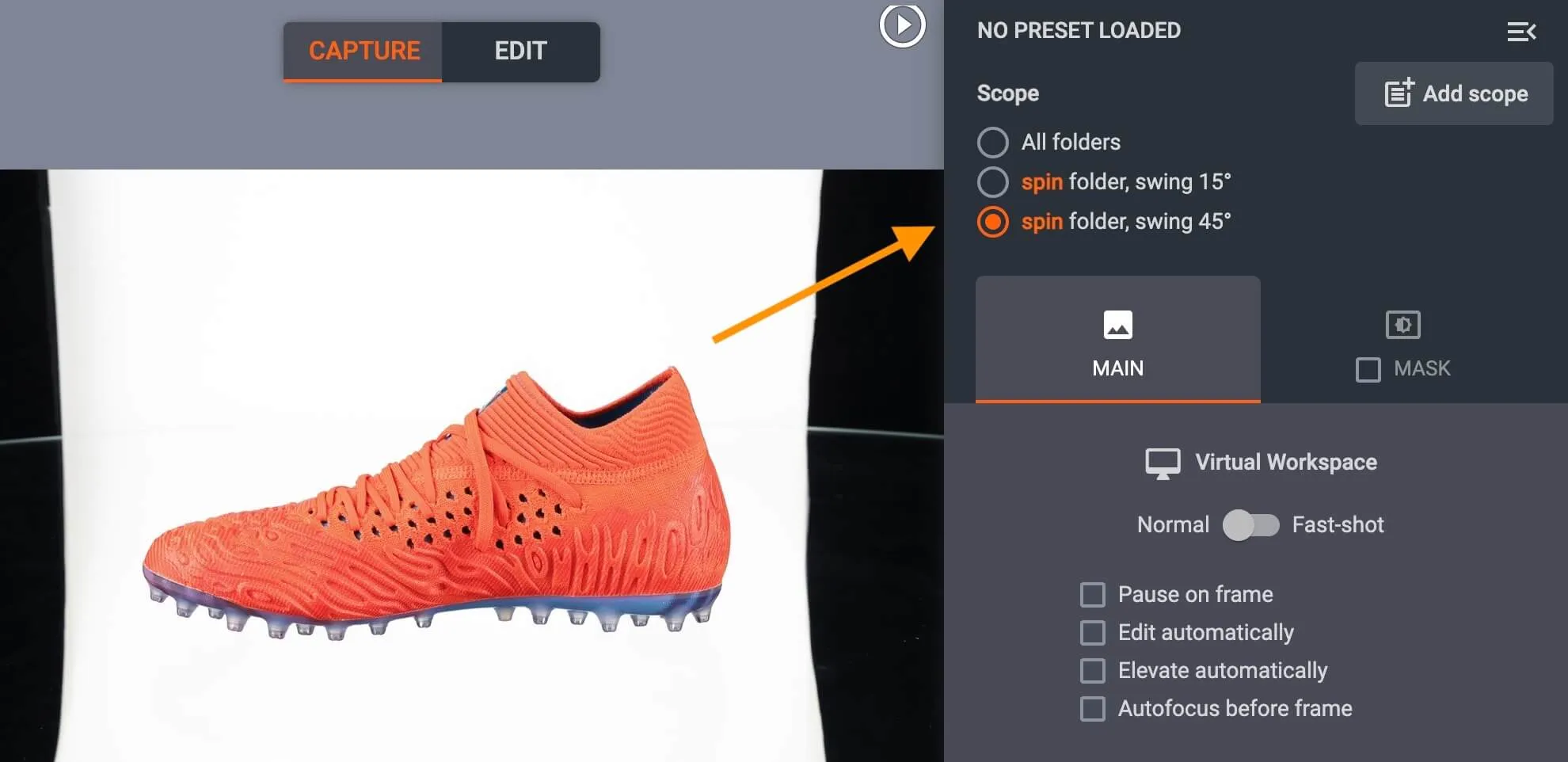
หากใช้การตั้งค่าขอบเขตที่แตกต่างกันกับมุมแกว่งหลายมุมให้คลิกมุมแกว่งเฉพาะเพื่อดูหรือกําหนดการตั้งค่าที่กําหนดให้กับโฟลเดอร์
- ตัวอย่างเช่นเป็นไปได้ที่จะกําหนดค่าแสงความเข้มต่ําสําหรับโฟลเดอร์หมุนที่มุมแกว่ง 15 °และแสงความเข้มสูงสําหรับโฟลเดอร์หมุนที่มุมแกว่ง 45 °
- ผู้ใช้ยังสามารถเพิ่มขอบเขตการตั้งค่าไปยังโฟลเดอร์ภาพนิ่งหรือโฟลเดอร์อื่น ๆ ภายในรายการ
- จากนั้นระบบจะใช้ขอบเขตการตั้งค่าโดยอัตโนมัติเมื่อถ่ายภาพ
เมื่อต้องการดูหรือกําหนดขอบเขตการตั้งค่าในรูปทั้งหมด ให้คลิก โฟลเดอร์ทั้งหมด หลังจากกําหนดขอบเขตการตั้งค่าแล้วการคลิกปุ่มเริ่มจะเริ่มกระบวนการจับภาพด้วยค่าที่ตั้งไว้ล่วงหน้าที่กําหนด
นอกจากนี้หากมีการกําหนดค่าแก้ไขโดยอัตโนมัติระบบจะจับภาพและใช้การดําเนินการแก้ไขที่กําหนดไว้ล่วงหน้า โดยอัตโนมัติ หลังจากคลิกปุ่มเริ่ม
( ! ) - หากต้องการค้นหาข้อมูลเพิ่มเติมเกี่ยวกับการดําเนินการแก้ไขทั้งหมดและฟังก์ชันการทํางานโปรดดูคู่มือการสนับสนุนผู้ใช้ PhotoRobot - การแก้ไขภาพ
ฟังก์ชันการทำงานของมาโคร & การกำหนดค่า
แมโครใน CAPP ช่วยให้ผู้ใช้สามารถกําหนดคําสั่งสําหรับกระบวนการจับภาพของรายการและโฟลเดอร์ (หมุนภาพนิ่ง ฯลฯ ) คําสั่งสามารถนําไปใช้กับแต่ละโฟลเดอร์หรือหลายโฟลเดอร์เรียกใช้ลําดับการแก้ไขภาพพื้นที่ทํางานที่ตั้งไว้ล่วงหน้าคัดลอกการตั้งค่าภาพและย้ายการตั้งค่าภาพ ผู้ใช้ยังสามารถปรับแต่งมาโครเพิ่มเติมตามชื่อ บาร์โค้ด แท็ก หรือบันทึกย่อได้อีกด้วย
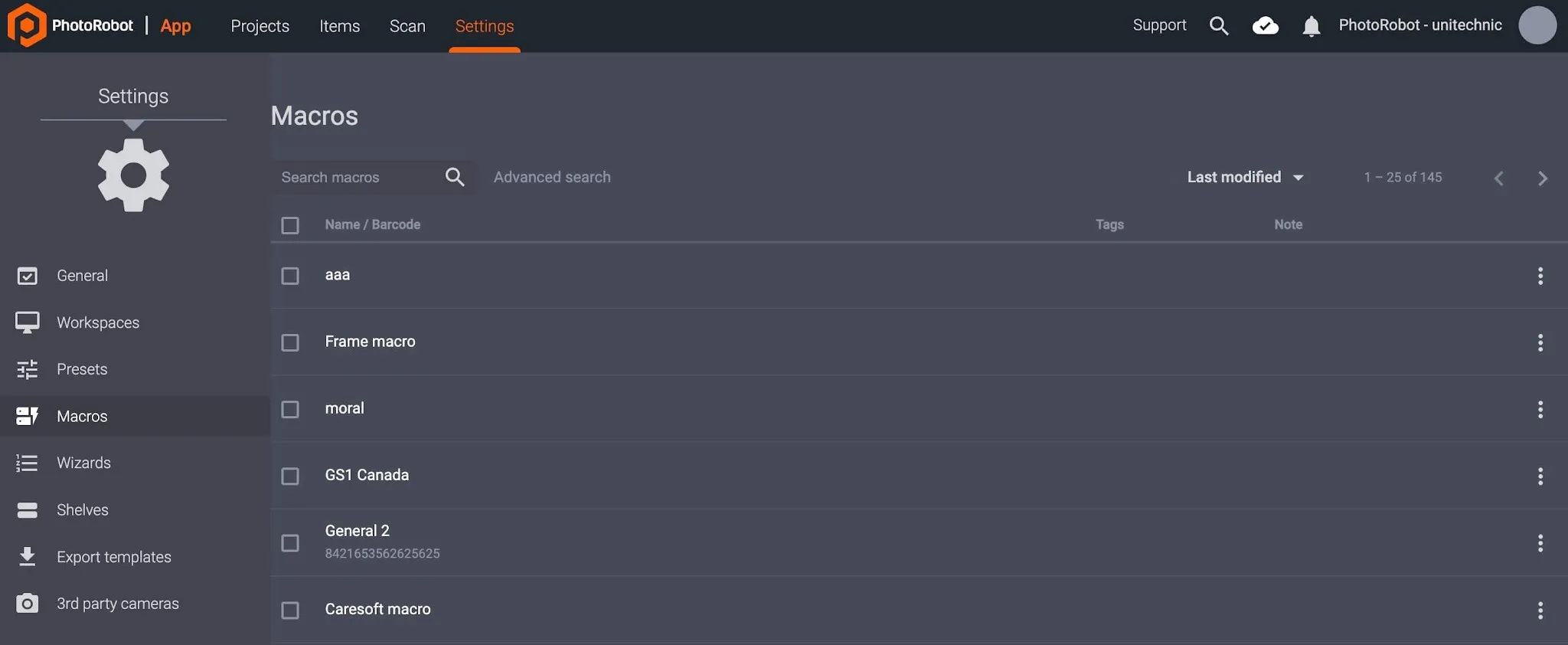
หมายเหตุ: สำหรับคำแนะนำโดยละเอียดเกี่ยวกับการกำหนดค่าและการใช้งาน PhotoRobot Macros โปรดดูที่ คู่มือผู้ใช้ PhotoRobot Macros ค้นหาว่า Macros ช่วยให้การถ่ายภาพอัตโนมัติ มหัศจรรย์ ได้อย่างไรในหลายโฟลเดอร์และส่วนประกอบ พร้อมกับการประมวลผลงานที่ซับซ้อนโดยอัตโนมัติ
โหมดวิซาร์ด PhotoRobot
โหมด Wizards ใน CAPP ทำหน้าที่เป็นทางเลือกแทนการกำหนดค่าฮาร์ดแวร์ กล้อง และลำดับด้วยตนเอง ในการใช้งาน โหมด Wizards ช่วยให้ผู้ดูแลระบบหรือช่างภาพสามารถสร้าง Wizards ที่แตกต่างกันเพื่อลดความซับซ้อนของโหมดการจับภาพสำหรับผู้ปฏิบัติงานในสายการผลิต จากนั้นผู้ปฏิบัติงานสามารถเริ่ม CAPP ในโหมด Wizards ซึ่งทำหน้าที่เป็นอินเทอร์เฟซที่เรียบง่ายอย่างยิ่งพร้อมขั้นตอนที่แนะนำโดย wizard นอกจากนี้ยังมีปุ่มควบคุมที่จำกัดเพื่อความสะดวกในการใช้งานและการเริ่มต้นใช้งาน
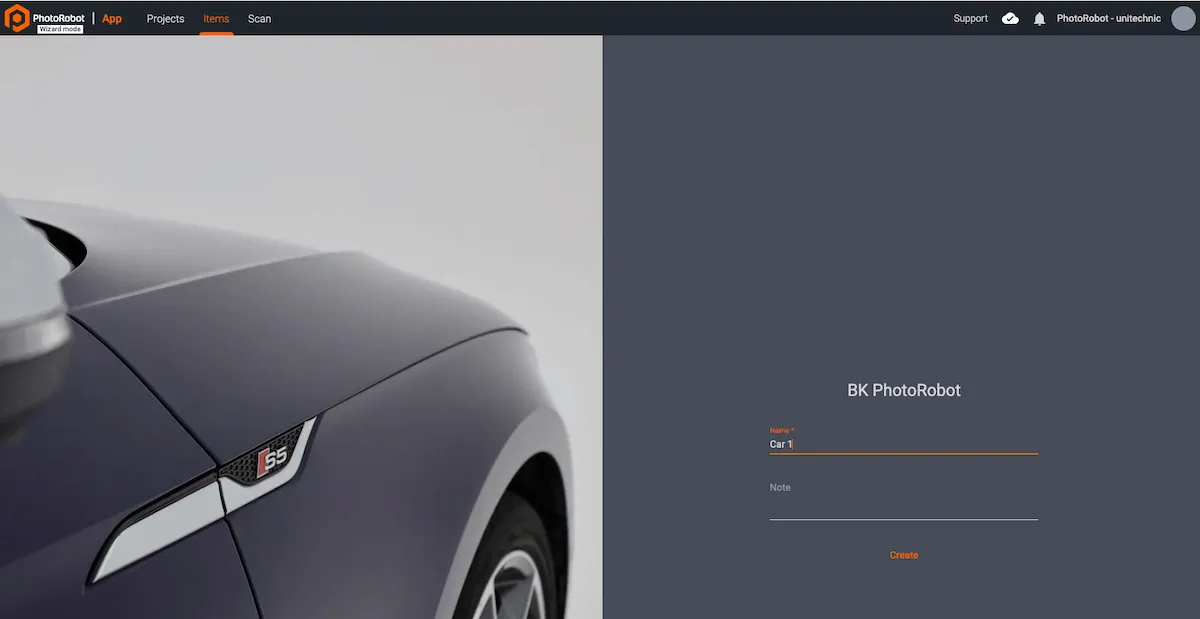
หลังจากสร้างวิซาร์ดแล้ว ระบบจะจัดเก็บการกำหนดค่า Presets และ Workspace รวมถึงขั้นตอนที่กำหนดไว้ล่วงหน้าที่ผู้ปฏิบัติงานต้องปฏิบัติตาม ผู้ปฏิบัติงานไม่สามารถปรับการตั้งค่าใดๆ ได้ และต้องทำตามคำแนะนำในแต่ละขั้นตอนให้เสร็จสิ้นก่อนจึงจะสามารถดำเนินการในขั้นตอนถัดไปได้
หมายเหตุ: ขั้นตอนของ Wizard ถูกกำหนดในรูปแบบภาษาที่คล้าย JavaScript และถูกเขียนสคริปต์โดยที่ปรึกษา PhotoRobot สำหรับฟังก์ชันการทำงานที่กำหนดเอง ผู้ใช้ยังสามารถเขียนสคริปต์ฟังก์ชันพื้นฐานสำหรับการทดลองเบื้องต้นหรือการตั้งค่าแบบง่าย สำหรับเอกสารเกี่ยวกับการกำหนดค่าทางเทคนิคและการใช้งาน Wizard ของผู้ปฏิบัติงาน โปรดดูที่ คู่มือผู้ใช้ PhotoRobot Wizard Mode


EOS Rebel ซีรีส์


EOS DSLR ซีรี่ส์


EOS M ซีรีส์มิเรอร์เลส


ซีรีส์ PowerShot


โคลสอัพ / มือถือ

Canon EOS Rebel Series นําเสนอกล้อง DSLR ที่เป็นมิตรกับผู้เริ่มต้น ด้วยคุณภาพของภาพที่มั่นคง การควบคุมที่ใช้งานง่าย และคุณสมบัติที่หลากหลาย กล้องเหล่านี้เหมาะอย่างยิ่งสําหรับผู้ที่ชื่นชอบการถ่ายภาพ ให้โฟกัสอัตโนมัติที่เชื่อถือได้ หน้าจอสัมผัสแบบปรับมุมได้ และการบันทึกวิดีโอ Full HD หรือ 4K
การเชื่อมต่อ
ความละเอียด (MP)
มติ
Canon EOS DSLR Series ให้ภาพคุณภาพสูง ออโต้โฟกัสที่รวดเร็ว และความอเนกประสงค์ ทําให้เหมาะสําหรับทั้งการถ่ายภาพและการผลิตวิดีโอ
การเชื่อมต่อ
ความละเอียด (MP)
มติ
Canon EOS M Mirrorless Series ผสมผสานการออกแบบที่กะทัดรัดเข้ากับประสิทธิภาพที่เหมือนกล้อง DSLR กล้องเหล่านี้มีเลนส์แบบเปลี่ยนได้ โฟกัสอัตโนมัติที่รวดเร็ว และเซ็นเซอร์ภาพคุณภาพสูง จึงเหมาะสําหรับนักเดินทางและผู้สร้างเนื้อหาที่ต้องการพกพาโดยไม่ลดทอนคุณภาพของภาพ
การเชื่อมต่อ
ความละเอียด (MP)
มติ
Canon PowerShot Series นําเสนอกล้องขนาดกะทัดรัดที่ใช้งานง่ายสําหรับผู้ที่ชื่นชอบการถ่ายภาพทั่วไป ด้วยรุ่นต่างๆ ตั้งแต่กล้องเล็งแล้วถ่ายภาพแบบธรรมดาไปจนถึงกล้องซูมขั้นสูง ให้ความสะดวกสบาย คุณภาพของภาพที่มั่นคง และคุณสมบัติต่างๆ เช่น ระบบป้องกันภาพสั่นและวิดีโอ 4K
การเชื่อมต่อ
ความละเอียด (MP)
มติ
กล้องโคลสอัพและกล้องมือถือของ Canon ได้รับการออกแบบมาสําหรับการถ่ายภาพและวิดีโอที่มีรายละเอียดและระยะใกล้ ขนาดกะทัดรัดและใช้งานง่าย ให้โฟกัสที่แม่นยํา การถ่ายภาพความละเอียดสูง และความสามารถด้านมาโครที่หลากหลาย เหมาะสําหรับวิดีโอบล็อก การถ่ายภาพผลิตภัณฑ์ และการถ่ายภาพระยะใกล้ที่สร้างสรรค์
การเชื่อมต่อ
ความละเอียด (MP)
มติ


