PhotoRobot SynchroBox - คู่มือผู้ใช้ฟังก์ชันและการตั้งค่า

เอกสารต่อไปนี้อธิบายฟังก์ชันการทำงานและการตั้งค่าของ PhotoRobot SynchroBox ซึ่งเป็น ตัวควบคุมกล้องหลายตัว ที่รองรับ PhotoRobot MultiCam. ข้อมูลนี้มีวัตถุประสงค์เพื่อสนับสนุนลูกค้า PhotoRobot ที่เพิ่งซื้ออุปกรณ์และกำลังใช้กล้องมากกว่าหนึ่งตัวกับ PhotoRobot SynchroBox ทำหน้าที่เป็นฮับกล้องหลายตัวที่ซิงโครไนซ์ชัตเตอร์กล้องของกล้องสองตัวขึ้นไป อ่านต่อเพื่อทำความเข้าใจทฤษฎี ฟังก์ชันการทำงาน และการตั้งค่าของ SynchroBox เพื่อช่วยอำนวยความสะดวกในการทำความเข้าใจพื้นฐานและการใช้งานอุปกรณ์ครั้งแรก
สำคัญ: การติดตั้งระบบ PhotoRobot ครั้งแรกจะต้องดำเนินการโดยผู้มีอำนาจของ PhotoRobot ที่ได้รับอนุญาตเสมอ ผู้มีอำนาจที่ได้รับอนุญาตให้ติดตั้ง PhotoRobot คือผู้จัดจำหน่ายที่ได้รับการอนุมัติ หรือตัวแทนของผู้ผลิตเอง นอกจากนี้ โปรดอ้างอิงถึง ข้อมูลและคำแนะนำด้านความปลอดภัยของ PhotoRobot พร้อมกับคู่มือใดๆ ที่ให้มาโดยเฉพาะกับอุปกรณ์ของคุณก่อนใช้งาน PhotoRobot ครั้งแรก
หมายเหตุ: สำหรับคำแนะนำในการประกอบและการใช้งานครั้งแรกของ PhotoRobot MULTICAM โปรดดูที่ การติดตั้ง PhotoRobot MULTICAM และ CENTERLESS TABLE.
คู่มือผู้ใช้ทางเทคนิค SynchroBox
ขอขอบคุณและขอแสดงความยินดีกับการซื้อ PhotoRobot ของคุณ PhotoRobot แสดงถึงประสบการณ์และนวัตกรรมระดับมืออาชีพในการถ่ายภาพอัตโนมัติมานานหลายทศวรรษ อุปกรณ์ทุกเครื่องนําเสนอระบบนิเวศของโซลูชันสําเร็จรูป พร้อมคุณสมบัติที่ปรับให้เหมาะกับความต้องการ เฉพาะของธุรกิจของคุณ
ยินดีต้อนรับสู่ PhotoRobot ใช้ข้อมูลทางเทคนิคต่อไปนี้เพื่อเริ่มต้นการเดินทางของคุณเพื่อทําความเข้าใจและเพิ่มการผลิตสูงสุดในสตูดิโอที่ขับเคลื่อนด้วย PhotoRobot
1. PhotoRobot SynchroBox - ทฤษฎี
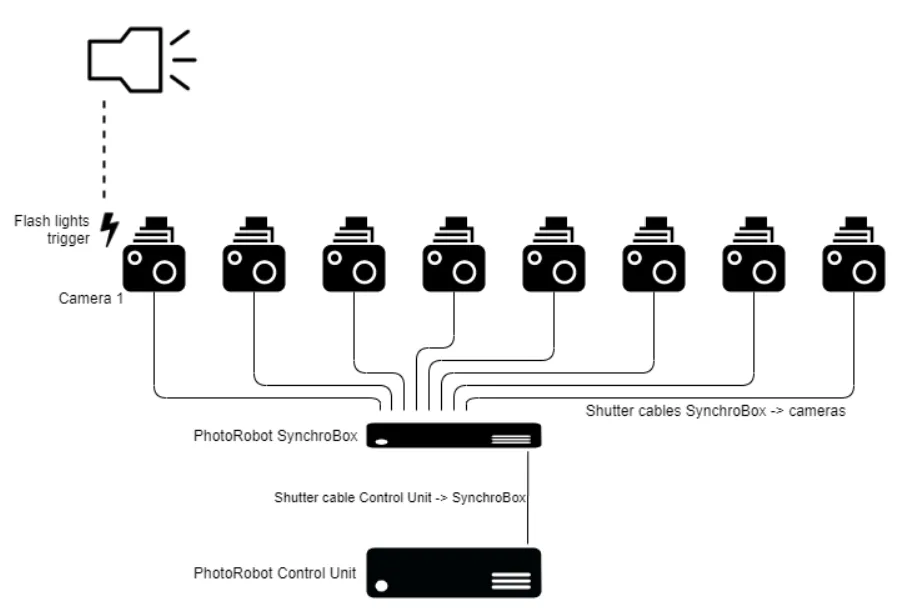
ต้องใช้ PhotoRobot SynchroBox เพื่อซิงโครไนซ์ชัตเตอร์ของกล้องเมื่อใช้กล้องสองตัวขึ้นไปกับระบบ PhotoRobot SynchroBox ทําหน้าที่เป็นฮับกล้องหลายตัวเพื่อซิงโครไนซ์การจับภาพแต่ละเฟรมโดยกล้องที่แตกต่างกันในช่วงเวลาที่เหมาะสม แสดงถึงวิธีแก้ปัญหาที่เกิดขึ้นเมื่อทํางานกับกล้องที่มีความล่าช้าของชัตเตอร์ต่างกัน และรองรับกล้องทั้งหมดสูงสุด 8 ตัว
เพื่อทําความเข้าใจทฤษฎีของ SynchroBox ยกตัวอย่างลําดับของโหมดจับภาพมาตรฐานเทียบกับโหมดจับภาพแบบหมุนเร็วด้วย PhotoRobot
ในโหมด จับภาพมาตรฐานมีลําดับต่อไปนี้
ก) แผ่นเคลื่อนไปยังมุมที่ต้องการ
b) จานหยุด
c) กล้องถ่ายภาพวัตถุ
d) แผ่นเริ่มเคลื่อนไปยังมุมถัดไป
ไม่มีการปรับเปลี่ยนที่จําเป็นในสถานการณ์นี้
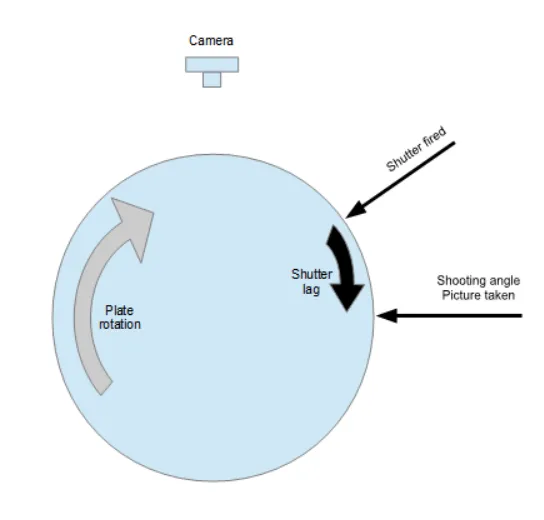
ในโหมด จับภาพแบบหมุนเร็ว ลําดับจะต้องมีอีกหลายขั้นตอน
ก) เพลตเริ่มหมุนด้วยความเร็วที่กําหนดไว้ล่วงหน้า
b) ชุดควบคุมรับรู้มุมที่จะจับภาพกําลังใกล้เข้ามา
c) ชุดควบคุมจะยิงชัตเตอร์ของกล้องผ่านสายชัตเตอร์ล่วงหน้า
d) กล้องจะเริ่มกระบวนการจับภาพ (การเคลื่อนไหวของม่านเซ็นเซอร์ ฯลฯ)
จ) กระบวนการถ่ายภาพใช้เวลาประมาณ 50 มิลลิวินาที ("ชัตเตอร์ล่าช้า")
f) เพลทเคลื่อนที่อย่างต่อเนื่องในช่วงเวลาหน่วงชัตเตอร์
g) เพลตไปถึงมุมที่ต้องการอย่างแม่นยําเมื่อสิ้นสุดความล่าช้าของชัตเตอร์ของกล้อง
h) ชุดควบคุมรับรู้ว่ามุมจับภาพถัดไปกําลังใกล้เข้ามา โดยทําซ้ําขั้นตอนการจับภาพเกี่ยวกับความล่าช้าของชัตเตอร์
i) การหมุนของเพลตจะสิ้นสุดลงหลังจาก 360 องศา หยุดการเคลื่อนไหว ทั้งหมด
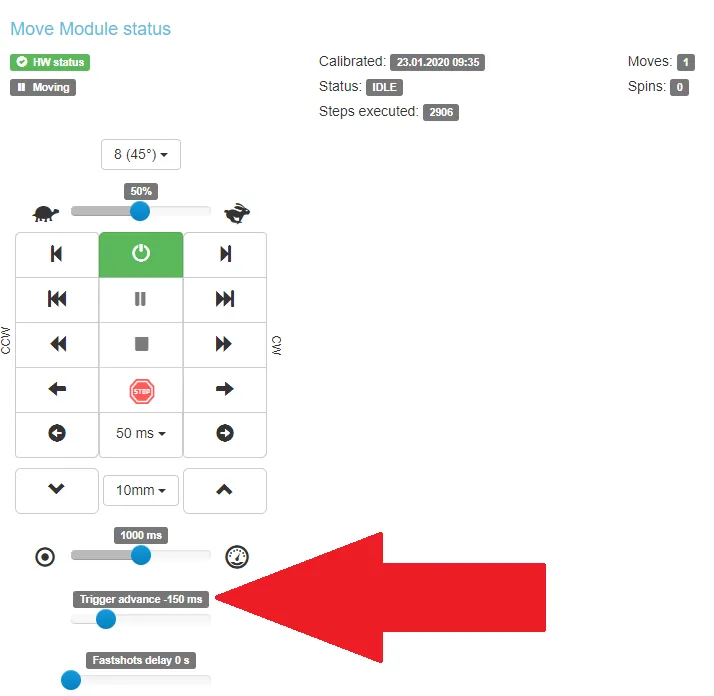
โน้ต: เนื่องจากกล้องแต่ละตัวมีความล่าช้าของชัตเตอร์ที่แตกต่างกัน จึงจําเป็นต้องปรับความก้าวหน้าของชัตเตอร์ของชุดควบคุมสําหรับกล้องแต่ละตัว สิ่งนี้เป็นไปได้สําหรับชุดควบคุม (รุ่นที่ 6) ผ่าน GUI บริการโดยใช้ตัวเลือก "ทริกเกอร์ล่วงหน้า" ค่า "ทริกเกอร์ล่วงหน้า" ต้องสูงกว่าความล่าช้าของชัตเตอร์ของกล้อง ตัวอย่างเช่น หากความล่าช้าของชัตเตอร์ของกล้องอยู่ที่ 80 มิลลิวินาที "ทริกเกอร์ล่วงหน้า" ควรเท่ากับหรือมากกว่า 90 มิลลิวินาทีโดยประมาณ
2. คําอธิบายอุปกรณ์ - PhotoRobot SynchroBox
โดยการออกแบบ SynchroBox เป็นอุปกรณ์ติดตั้งบนแร็คที่ออกแบบมาสําหรับการซิงโครไนซ์ชัตเตอร์กล้องของกล้องสองตัวขึ้นไป จําเป็นเมื่อใช้งานระบบ PhotoRobot โดยใช้กล้องมากกว่าหนึ่งตัวในแต่ละครั้ง SynchroBox หนึ่งตัวรองรับกล้องได้สูงสุด 8 ตัว ซึ่งเป็นโซลูชันในการแก้ไขปัญหาความล่าช้าของชัตเตอร์ต่างๆ ของกล้องที่ใช้งานอยู่


ยกตัวอย่างสถานการณ์ที่ใช้กล้องสองตัวและ SynchroBox เป็นตัวแยกสัญญาณสําหรับกล้องทั้งสองตัวเท่านั้นโดยไม่มีการตั้งค่าเพิ่มเติม ในขณะเดียวกัน ค่า "ทริกเกอร์ล่วงหน้า" ของชุดควบคุม G6 จะเป็นศูนย์ จากนั้นชัตเตอร์จะยิงเมื่อเพลทถึงมุมที่ต้องการ
ในกรณีนี้ขั้นตอนของลําดับคือ:
ก) จานถึงมุมที่ต้องการ
b) ชุดควบคุมจะยิงชัตเตอร์ของกล้องผ่านสายชัตเตอร์
c) ความล่าช้าของชัตเตอร์สําหรับกล้องทั้งสองตัวจะนับถอยหลังในขณะที่เพลทเคลื่อนที่อย่างต่อเนื่อง
d) กล้องตัวแรกถ่ายภาพ 50 ms หลังจากจุดจับภาพที่ต้องการโดยใช้ "มุมที่ต้องการ + X" องศา
e) กล้องตัวที่สองจับภาพ 70 ms หลังจากจุดจับภาพที่ต้องการโดยใช้องศา "มุมที่ต้องการ + Y"
f) องศาค่า "Y" มากกว่าองศาค่า "X"
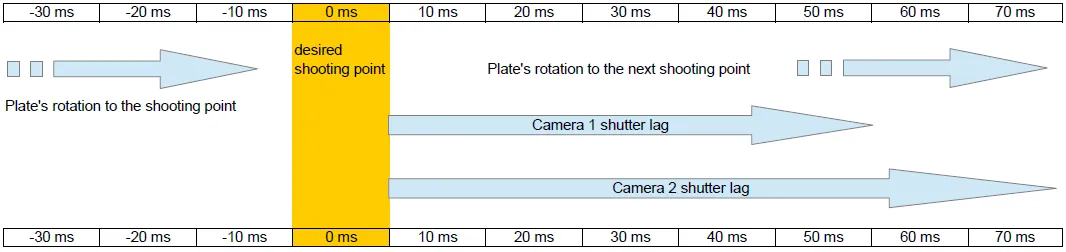
ส่งผลให้ไม่มีภาพที่ถ่ายได้ตามมุมที่ต้องการ ดังนั้นจึงจําเป็นต้องมีการปรับเปลี่ยนเพื่อให้กล้องทั้งสองตัวถ่ายภาพจุดจับภาพที่ต้องการในช่วงเวลาที่ถูกต้อง
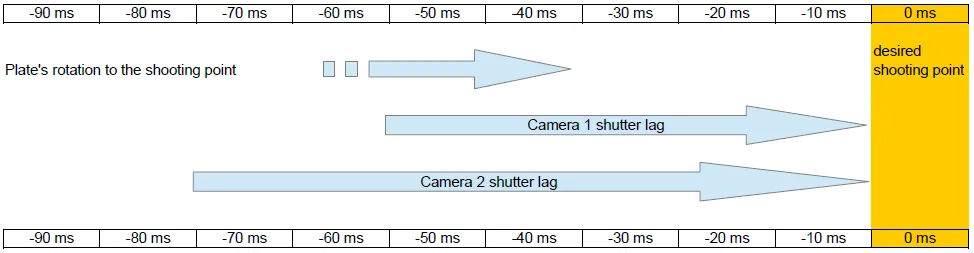
สําหรับสิ่งนี้ SynchroBox จะได้รับพัลส์ "ยิงชัตเตอร์" จากชุดควบคุม G6 และระบุความยาวของพัลส์โดยอัตโนมัติ
นอกจากนี้ SynchroBox ยังมีค่าความล่าช้าของชัตเตอร์สําหรับกล้องที่เชื่อมต่อแต่ละตัว ซึ่งป้อนด้วยตนเองเมื่อตั้งค่า
เมื่อใช้พารามิเตอร์ทั้งสองนี้ SynchroBox จะนับและยิงชัตเตอร์ของกล้องแต่ละตัวด้วยความก้าวหน้าที่เหมาะสม
3. วิธีวัดความล่าช้าของชัตเตอร์กล้อง
ในการวัดความล่าช้าของชัตเตอร์ของกล้อง จําเป็นต้องมี PhotoRobot ที่มีแผ่นหมุน ชุดควบคุม G6+ และกล้องที่เชื่อมต่อผ่านสายชัตเตอร์เข้ากับชุดควบคุม
ถัดไป คอมพิวเตอร์ภายในเครื่องที่มีซอฟต์แวร์แอพ PhotoRobot Controls จะต้องเชื่อมต่อกับกล้องผ่านสาย USB
สุดท้าย จําเป็นต้องใช้ ไม้โปรแทรกเตอร์ 360 องศา (ดาวน์โหลดได้ทางออนไลน์) เพื่อทําตามขั้นตอนต่อไปนี้
ก) วางไม้โปรแทรกเตอร์บนแผ่นอุปกรณ์ PhotoRobot โดยใช้ตัวชี้ที่อยู่นอกเพลตและชี้ไปที่ขอบ
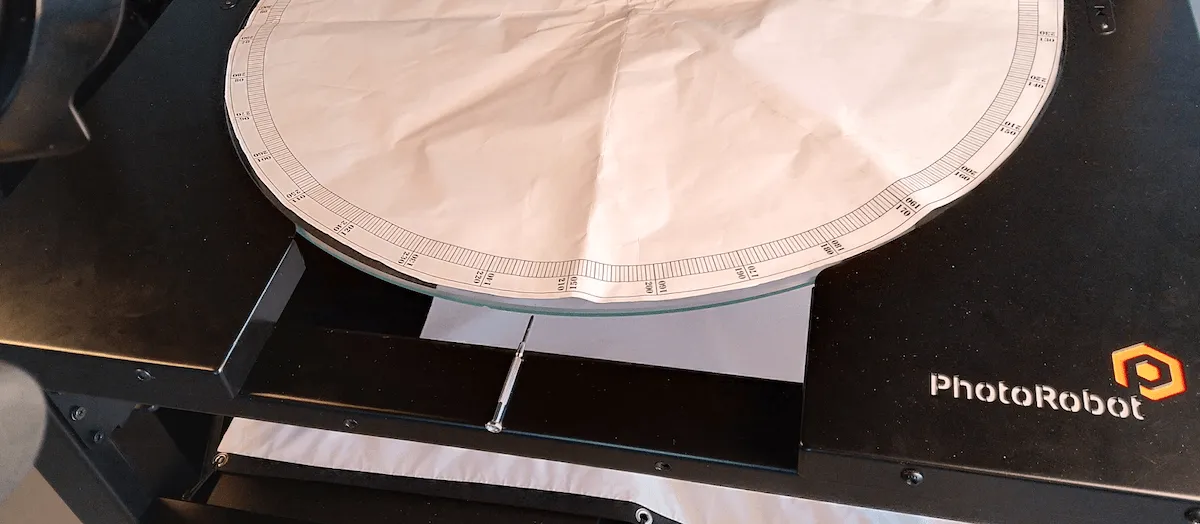
b) หมุนจานจนกระทั่งตัวชี้อยู่ที่ศูนย์ หมายเหตุ ขั้นตอนนี้ทําได้ด้วยมือแม้ว่าเครื่องยนต์ไฟฟ้าจะดับอยู่ก็ตาม
c) เริ่มซอฟต์แวร์ PhotoRobot Controls App ลงชื่อเข้าใช้บัญชีของคุณ และสร้างรายการโดยใช้พื้นที่ทํางานโดยคํานึงถึงการกําหนดค่าที่กําหนด จากนั้นเปิดโหมดจับภาพและเปิดโฟลเดอร์ "อื่นๆ"
d) ถัดไป ในแท็บใหม่บนเบราว์เซอร์ของคุณ ให้เปิด GUI บริการของชุดควบคุม (G6) ซึ่งให้การควบคุมเพลตโดยใช้ที่อยู่ IP
e) ใน GUI บริการ ให้ตั้งค่าหุ่นยนต์ด้วยพารามิเตอร์ต่อไปนี้:
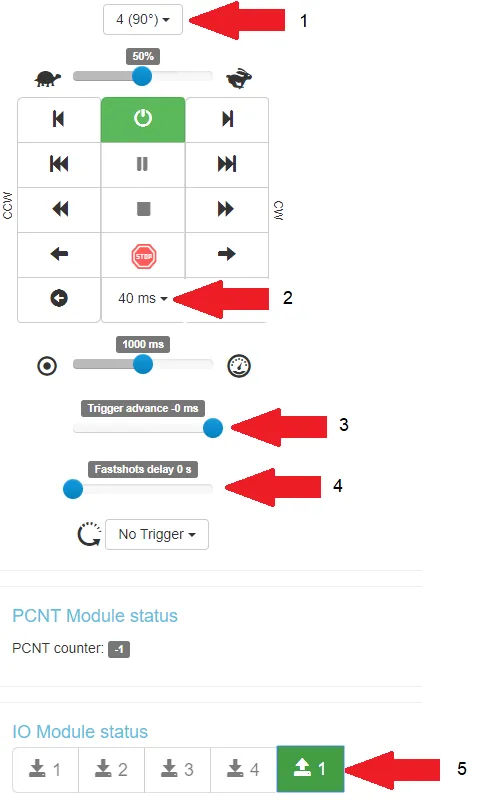
- 1 = 4 ภาพ 90 องศา;
- 2 = ความยาวพัลส์ 40 ms สําหรับทริกเกอร์ชัตเตอร์
- 3 = ทริกเกอร์ล่วงหน้า 0 ms (ไม่มีล่วงหน้า);
- 4 = ไม่มีความล่าช้าของ fastshots
- 5 = เปิดใช้งานการกดชัตเตอร์ลงครึ่งหนึ่ง
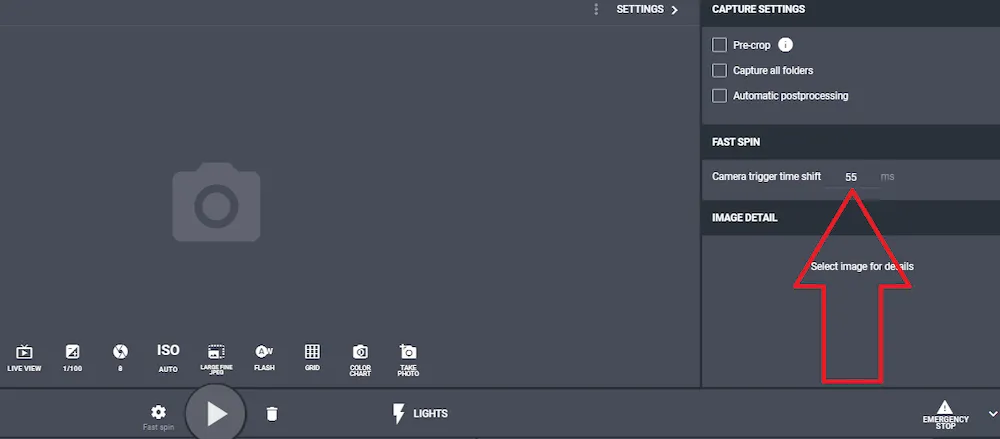
f) เริ่มลําดับโดยคลิกลูกศรขวาที่มุมล่างขวาของแผงควบคุม:
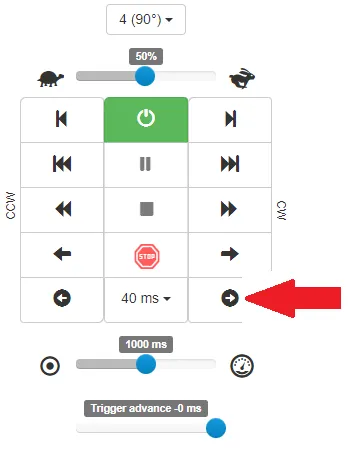
โน้ต: ลําดับเริ่มต้นที่ 90 องศาและสิ้นสุดที่ 0 องศา ในขณะเดียวกัน รูปภาพทั้งหมดจะถูกบันทึกลงในโฟลเดอร์ "อื่นๆ" ในแอพควบคุมตามที่กําหนดค่าไว้ก่อนหน้านี้
ตัวอย่างเช่น โปรดดูเอาต์พุตตัวอย่างต่อไปนี้ (โดยมีทิศทางการหมุนไปทางซ้าย):
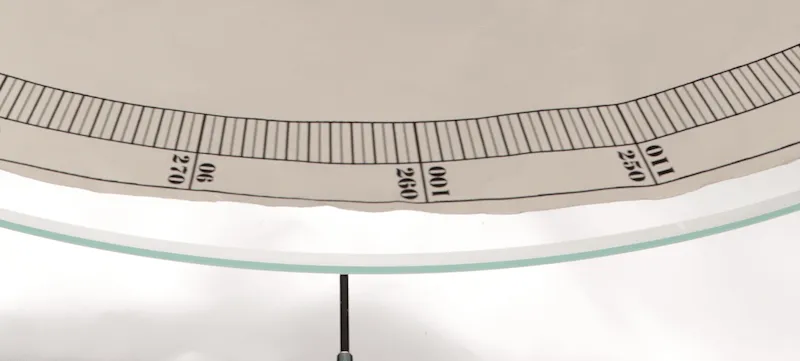
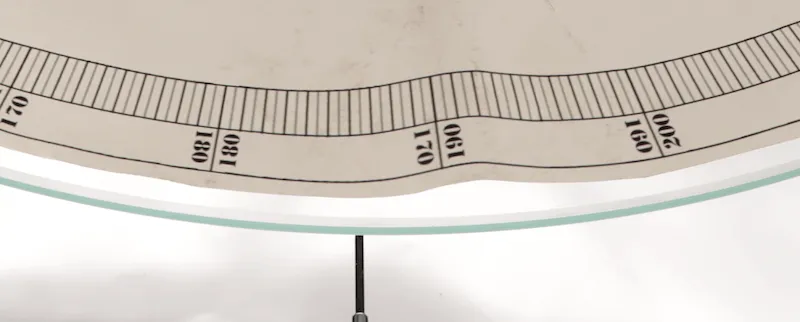
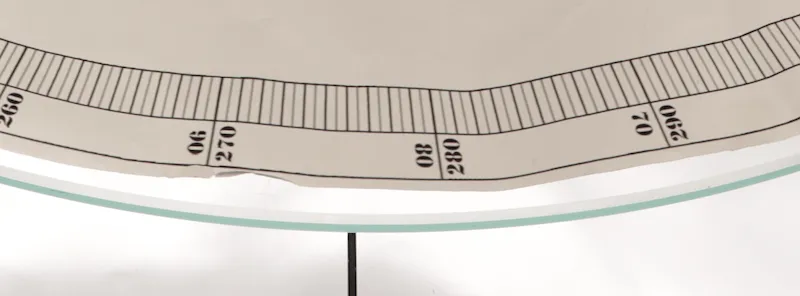
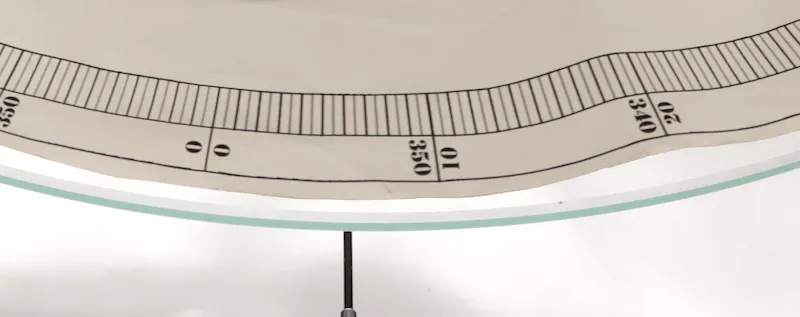
- โน้ต: ในตัวอย่างเหล่านี้ การจับภาพจะอยู่ที่ประมาณ 6 องศาหลังจากยิงไกปืน
g) ถัดไป เพื่อแปลง 6 องศาเป็นจํานวนมิลลิวินาที (ms) ในกรณีนี้ ให้เริ่มการหมุนเพลตของ PhotoRobot อย่างต่อเนื่องโดยใช้ความเร็วเดียวกันจากขั้นตอนก่อนหน้าใน GUI บริการ
- เริ่มนาฬิกาจับเวลาและบันทึกเวลา 10 รอบ
- ในกรณีทดสอบนี้ ค่าผลลัพธ์คือ 61 วินาที (61,000 มิลลิวินาที)
- นั่นหมายความว่า 10 รอบเท่ากับ 10 * 360 องศา (3,600 องศา)
- มีการเคลื่อนที่ของเวลา 1 องศา กินเวลา 61,000 ms / 3,600 องศา เท่ากับ 16.94 ms
- มีการเคลื่อนที่เวลา 6 องศาเป็นเวลา 16.94 ms * 6 ซึ่งเท่ากับ 101.64 ms
- ดังนั้นการหน่วงเวลาชัตเตอร์โดยประมาณจึงอยู่ที่ประมาณ 102 มิลลิวินาที
h) สุดท้าย จําเป็นต้องทําซ้ําขั้นตอนก่อนหน้านี้ทั้งหมดเพื่อระบุการหน่วงเวลาชัตเตอร์สําหรับกล้องแต่ละตัวที่ใช้งานอยู่
4. การตั้งค่า SynchroBox
สําหรับการตั้งค่า SynchroBox ข้อกําหนดเบื้องต้นคือมีชุดควบคุม (G6) ติดตั้งและทํางานได้อย่างสมบูรณ์ นอกจากนี้ ตามหลักการแล้วจะมีกล้อง 2 ตัวขึ้นไปจากผู้ผลิตรายเดียวกันและรุ่นเดียวกัน โดยแต่ละตัวมีความล่าช้า ของชัตเตอร์ที่ทราบ
ในกรณีนี้ ให้ใช้ขั้นตอนต่อไปนี้เพื่อตั้งค่า SynchroBox
4.1. เชื่อมต่อ SynchroBox กับชุดควบคุม G6 ผ่านสายชัตเตอร์ หมายเหตุ สายชัตเตอร์นี้จัดทําโดย PhotoRobot โดยเป็นส่วนหนึ่งของการจัดส่ง SynchroBox หรือภายใต้หมายเลขชิ้นส่วน KHCAR1R05 สายชัตเตอร์เชื่อมต่อพอร์ต Control Unit G6 "OUT" เข้ากับพอร์ต SynchroBox "->IN" (อันที่เล็กกว่า ไม่ใช่อีกพอร์ต "=>IN")
4.2. เชื่อมต่อ SynchroBox กับเครือข่ายผ่านสายอีเทอร์เน็ตมาตรฐาน โดยใช้ซับเน็ตเดียวกันที่เชื่อมต่อกับชุดควบคุม
4.3. เชื่อมต่อกล้องทั้งหมดที่จะใช้งานกับ SynchroBox โดยใช้สายชัตเตอร์
โน้ต: สายชัตเตอร์สําหรับ SynchroBox ไปยังกล้องจะถูกจัดส่งโดย PhotoRobot ภายใต้หมายเลขชิ้นส่วน KHCARCJ (ขั้วต่อแจ็ค Canon 2.5 มม.) หรือ KHCARN3 (ขั้วต่อ Canon N3) บวกกับ KHCAR1R05 ต่อขยาย หรือที่เรียกว่าชุดสายชัตเตอร์

4.4. โปรดทราบว่ากล้อง 1 (พอร์ต 1 ของ SynchroBox) ถือและใช้งานอุปกรณ์ทริกเกอร์ไฟแฟลช กล้องนี้ต้องมีความล่าช้าของชัตเตอร์มากที่สุด
4.5. ตั้งค่า "ทริกเกอร์ล่วงหน้า" ของชุดควบคุม (G6) ตามความล่าช้าของชัตเตอร์ของกล้องที่ช้าที่สุด (อธิบายไว้ก่อนหน้านี้ในส่วนที่ 1 ของเอกสารนี้) หมายเหตุ: เมื่อใช้แอพ PhotoRobot Controls โปรดทราบว่าค่านี้จะถูกปรับ / แทนที่ด้วยค่าที่ตั้งไว้สําหรับโหมดจับภาพ - Fast Spin:
4.6. ถัดไป เข้าถึง GUI บริการของ SynchroBox โดยป้อนที่อยู่ IP ใน URL รูปแบบลงในของคุณ web เบราว์เซอร์
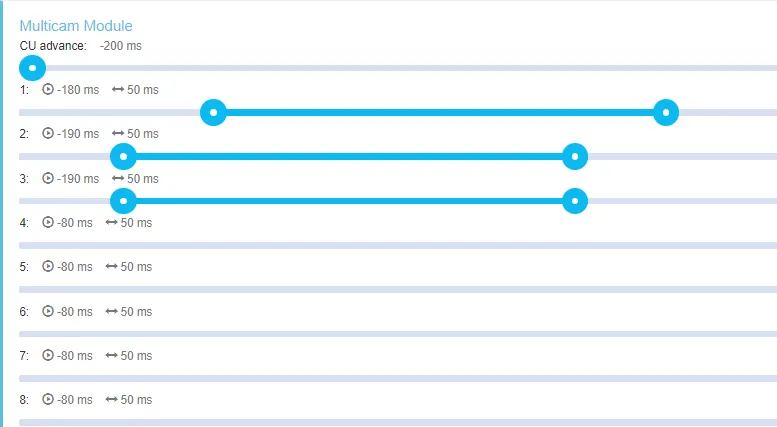
4.7. ตั้งค่าแถบเลื่อนแรก "CU advance" เป็นค่าเดียวกับที่อยู่ในชุดควบคุม หรือเป็นค่าที่สอดคล้องกันใน PhotoRobot Controls หมายเหตุ โปรดทราบว่าหากค่าทั้งสองนี้แตกต่างกัน ค่าใน PhotoRobot Controls จะมีความสําคัญเหนือกว่า จากนั้นมีแถบเลื่อน 8 ตัวที่สอดคล้องกับพอร์ต 8 พอร์ตบน SynchroBox แถบเลื่อนแต่ละตัวมีค่าสองค่า: ค่าล่วงหน้า (ปุ่มซ้าย) และความยาวของชีพจร (ปุ่มขวา) ค่าขั้นสูงเท่ากับความล่าช้าของชัตเตอร์ของกล้องที่ควบคุม (โดยมีค่าจริงที่น้อยที่สุดประมาณ -50 มิลลิวินาที) ความยาวของพัลส์จะสัมพันธ์กับกรอบเวลาที่สายชัตเตอร์ของกล้องยังคงสัมผัส ค่านี้จัดทําโดยผู้ผลิตกล้อง หรือหากไม่ทราบ สามารถตั้งค่าเป็น 40 - 60 มิลลิวินาที
4.8. ตั้งค่าช่องสัญญาณเข้าใน GUI บริการ SynchroBox หมายเหตุ เมื่อใช้สายชัตเตอร์ของ PhotoRobot การตั้งค่าจะเป็นดังนี้เสมอ
- พอร์ต IN: A = โฟกัส B = ทริกเกอร์
- พอร์ต 1 - 8: A = ทริกเกอร์, B = โฟกัส
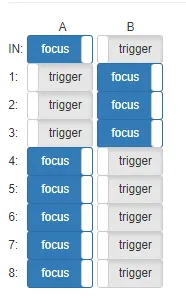
- โปรดทราบว่ามีเพียงกล้อง 1, 2 และ 3 เท่านั้นที่ตั้งค่าในตัวอย่างข้างต้น
- เนื่องจาก PhotoRobot มีจุดประสงค์เพื่อใช้ไฟแฟลช ให้ตั้งค่าความเร็วชัตเตอร์ของกล้อง 1 เป็น 1/100 หรือ 1/125
4.9. สุดท้าย ให้กําหนดค่าการตั้งค่าเริ่มต้นของกล้องอื่นๆ ทั้งหมดให้มีความเร็วชัตเตอร์ที่ยาวขึ้นมาก เช่น 1/30 - 1/60 วิธีนี้จะช่วยอธิบายความแตกต่างที่เป็นไปได้ของความล่าช้าของชัตเตอร์ระหว่างกล้องที่ใช้งานอยู่ กรอบเวลาที่ยาวขึ้นจะช่วยให้มั่นใจได้ว่ากล้องทุกตัวจะทันจุดสูงสุดของแฟลชจากแฟลชทั้งหมด เมื่อทํางานอย่างถูกต้อง จะสามารถทดลองได้โดยลดความเร็วชัตเตอร์ของกล้องตัวอื่นหากจําเป็น
5. การตั้งค่า SynchroBox หลายรายการ
SynchroBox รองรับกล้องได้สูงสุด 8 ตัว หากจําเป็นต้องใช้กล้องมากกว่า 8 ตัว ก็สามารถคูณจํานวน SynchroBoxes ที่ใช้งานอยู่ได้

- เชื่อมต่อพอร์ต OUT ของ SynchroBox ตัวแรกเข้ากับพอร์ต IN ของ SynchroBox ตัวถัดไป โดยใช้สายชัตเตอร์เส้นเดียวกับที่เชื่อมต่อชุดควบคุมกับ SynchroBox สายชัตเตอร์นี้จัดทําโดย PhotoRobot โดยเป็นส่วนหนึ่งของการจัดส่ง SynchroBox หรือภายใต้หมายเลขชิ้นส่วน KHCAR1R05


EOS Rebel ซีรีส์


EOS DSLR ซีรี่ส์


EOS M ซีรีส์มิเรอร์เลส


ซีรีส์ PowerShot


โคลสอัพ / มือถือ

Canon EOS Rebel Series นําเสนอกล้อง DSLR ที่เป็นมิตรกับผู้เริ่มต้น ด้วยคุณภาพของภาพที่มั่นคง การควบคุมที่ใช้งานง่าย และคุณสมบัติที่หลากหลาย กล้องเหล่านี้เหมาะอย่างยิ่งสําหรับผู้ที่ชื่นชอบการถ่ายภาพ ให้โฟกัสอัตโนมัติที่เชื่อถือได้ หน้าจอสัมผัสแบบปรับมุมได้ และการบันทึกวิดีโอ Full HD หรือ 4K
การเชื่อมต่อ
ความละเอียด (MP)
มติ
Canon EOS DSLR Series ให้ภาพคุณภาพสูง ออโต้โฟกัสที่รวดเร็ว และความอเนกประสงค์ ทําให้เหมาะสําหรับทั้งการถ่ายภาพและการผลิตวิดีโอ
การเชื่อมต่อ
ความละเอียด (MP)
มติ
Canon EOS M Mirrorless Series ผสมผสานการออกแบบที่กะทัดรัดเข้ากับประสิทธิภาพที่เหมือนกล้อง DSLR กล้องเหล่านี้มีเลนส์แบบเปลี่ยนได้ โฟกัสอัตโนมัติที่รวดเร็ว และเซ็นเซอร์ภาพคุณภาพสูง จึงเหมาะสําหรับนักเดินทางและผู้สร้างเนื้อหาที่ต้องการพกพาโดยไม่ลดทอนคุณภาพของภาพ
การเชื่อมต่อ
ความละเอียด (MP)
มติ
Canon PowerShot Series นําเสนอกล้องขนาดกะทัดรัดที่ใช้งานง่ายสําหรับผู้ที่ชื่นชอบการถ่ายภาพทั่วไป ด้วยรุ่นต่างๆ ตั้งแต่กล้องเล็งแล้วถ่ายภาพแบบธรรมดาไปจนถึงกล้องซูมขั้นสูง ให้ความสะดวกสบาย คุณภาพของภาพที่มั่นคง และคุณสมบัติต่างๆ เช่น ระบบป้องกันภาพสั่นและวิดีโอ 4K
การเชื่อมต่อ
ความละเอียด (MP)
มติ
กล้องโคลสอัพและกล้องมือถือของ Canon ได้รับการออกแบบมาสําหรับการถ่ายภาพและวิดีโอที่มีรายละเอียดและระยะใกล้ ขนาดกะทัดรัดและใช้งานง่าย ให้โฟกัสที่แม่นยํา การถ่ายภาพความละเอียดสูง และความสามารถด้านมาโครที่หลากหลาย เหมาะสําหรับวิดีโอบล็อก การถ่ายภาพผลิตภัณฑ์ และการถ่ายภาพระยะใกล้ที่สร้างสรรค์
การเชื่อมต่อ
ความละเอียด (MP)
มติ


