คู่มือผู้ใช้ PhotoRobot Cube V5 / V6 / Compact
คู่มือผู้ใช้นี้ให้คําแนะนําทางเทคนิคเกี่ยวกับการติดตั้ง การเชื่อมต่อ และการใช้ PhotoRobot Cube V5 / V6 / Compact ประกอบด้วยคําแนะนําเกี่ยวกับวิธีการติดตั้งหุ่นยนต์ Cube เป็นตัวยึดลําตัวแบบหมุนได้ คู่มือนี้มีจุดมุ่งหมายเพื่อสนับสนุนลูกค้า PhotoRobot ในระหว่างการประกอบอุปกรณ์ การใช้งานครั้งแรก และในการเริ่มต้นใช้งานผู้ปฏิบัติงานในสายการผลิต

โน้ต: การติดตั้งอุปกรณ์ PhotoRobot ครั้งแรกต้องดําเนินการโดยหน่วยงานที่ได้รับอนุญาตของ PhotoRobot เสมอ หน่วยงานที่ได้รับอนุญาตให้ติดตั้ง PhotoRobot คือผู้จัดจําหน่ายที่ได้รับอนุมัติหรือเป็นตัวแทนของผู้ผลิตเอง
สําคัญ: ก่อนอื่นให้อ้างอิงถึงข้อมูลและคําแนะนําด้านความปลอดภัยของ PhotoRobot นอกเหนือจากคู่มือที่ให้มาพร้อมกับอุปกรณ์ของคุณโดยเฉพาะก่อนการติดตั้งด้วยตนเองหรือใช้งานครั้งแรก
Cube V5 / V6 / การใช้งานและการติดตั้งครั้งแรกขนาดกะทัดรัด
ขอขอบคุณและขอแสดงความยินดีกับการซื้อ PhotoRobot Cube! อุปกรณ์ของคุณแสดงถึงประสบการณ์ระดับมืออาชีพ ความรู้ และนวัตกรรมในการถ่ายภาพอัตโนมัติมานานหลายทศวรรษ การออกแบบหุ่นยนต์ทุกตัวอยู่ในใจคุณ ในขณะเดียวกันซอฟต์แวร์ก็อยู่ระหว่างการพัฒนาอย่างต่อเนื่อง – ปรับให้เข้ากับความต้องการเฉพาะในขณะที่เป็นประโยชน์ต่อระบบนิเวศของ PhotoRobot ทั้งหมดในทุกครั้งที่อัปเดต
ยินดีต้อนรับสู่ PhotoRobot ใช้เอกสารทางเทคนิคนี้บน Cube V5 / V6 / Compact PhotoRobots เพื่อทําความคุ้นเคยกับเทคโนโลยี และสําหรับคําแนะนําโดยละเอียดเกี่ยวกับการประกอบและการใช้งานโซลูชันครั้งแรก
1. รายละเอียดสินค้า - ลูกบาศก์ V5 / V6 / กะทัดรัด
อุปกรณ์ PhotoRobot Cube V5 / V6 / Compact เป็นหนึ่งในหุ่นยนต์สตูดิโอถ่ายภาพที่หลากหลายที่สุด แต่ละ Cube สามารถทํางานแบบสแตนด์อโลนหรือใช้ร่วมกับ PhotoRobot อื่นๆ และมีการกําหนดค่าสําหรับโหมดการทํางานที่แตกต่างกัน 3 โหมด Cube ทําหน้าที่เป็นแท่นถ่ายภาพแบบหมุนในโหมดระงับวัตถุและเป็นที่ยึดลําตัวแบบหมุนได้

คุณสมบัติที่สําคัญของ PhotoRobot Cube ได้แก่:
- การใช้งานแบบสแตนด์อโลนหรือใช้ร่วมกับ PhotoRobot ที่เข้ากันได้
- ตั้งค่าอย่างรวดเร็วเป็นเครื่องเล่นแผ่นเสียง 360 องศา หรือในโหมดระงับวัตถุ
- รองรับที่ยึดลําตัวหุ่นหรือแท่นหมุน
- เข้ากันได้กับหุ่นถ่ายภาพประเภทและขนาดต่างๆ
- มีให้เลือกทั้งรุ่น Cube V5, V6 และ Compact เพื่อความคล่องตัวที่มากขึ้น
1.1. ภาพรวมอุปกรณ์ - Cube V5 / V6 / Compact
Cube V5, Cube V6 และ Cube Compact ของ PhotoRobot ทํางานในสามรูปแบบที่แตกต่างกัน การกําหนดค่ามาตรฐานเกี่ยวข้องกับการใช้อุปกรณ์เป็นแพลตฟอร์มการถ่ายภาพแบบหมุนได้ หรือเพื่อแขวนวัตถุในอากาศเพื่อถ่ายภาพ อีกวิธีหนึ่งคือสามารถตั้งค่าอุปกรณ์เป็นขาตั้งแบบหมุนได้เพื่อติดตั้งลําตัวของหุ่น
a) การตั้งค่า 360 Photo / Rotary Platform:

b) 360 / โหมดช่วงล่างแบบหมุน:

c) ผู้ถือลําตัวหุ่นหมุน:

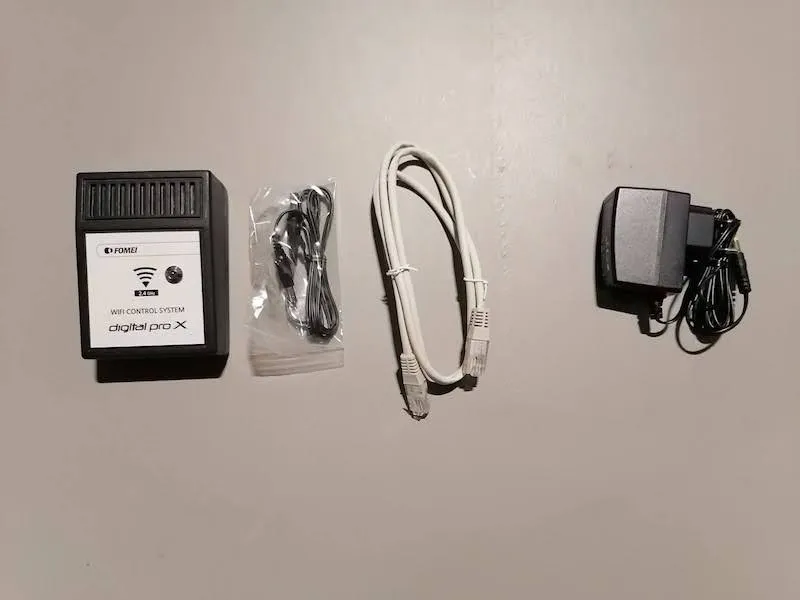
โน้ต: ชุดควบคุมของ Cube V5 และ Cube V6 เป็นส่วนประกอบที่แยกจากกันแต่เป็นส่วนหนึ่งของอุปกรณ์ Cube Compact มีชุดควบคุมในตัวภายในเครื่อง
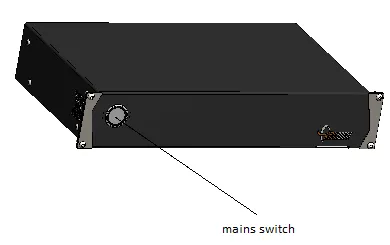
- ภาพด้านบนแสดงชุดควบคุมสําหรับ Cube V5 / Cube V6
1.2. พารามิเตอร์ทางเทคนิคของ Cube Compact
มีพารามิเตอร์ทางเทคนิคต่อไปนี้สําหรับ Cube Compact
- น้ําหนัก: 26.21 กก
- ขนาด: 337.5 x 373.5 x 209.5 mm
- แหล่งจ่ายไฟ: 100 - 230 V, 50 HZ, ฟิวส์ T1.6 A (230 V), T3.15 A (115 V)
- รับน้ําหนักได้: 130 กก. สําหรับติดตั้งทั้งด้านล่างและด้านบน
- แรงบิดของเพลาขาออก: 143.5 นิวตันเมตร
- ความเร็ว: 0 -17 1.min-1
1.3. อุปกรณ์เสริม Cube Compact
Cube Compact มีชิ้นส่วนและอุปกรณ์เสริมดังต่อไปนี้
ก) ไม้แขวนเสื้อ:

b) ฐานด้านล่าง:

c) ฐานบน:
d) เท้าเครื่อง:

จ) จาน:

f) พอร์ทัล:

1.4. การติดตั้งและใช้งาน Cube Compact Overview
นอกจากอุปกรณ์เสริม Cube Compact แล้ว ยังมีการกําหนดค่าหลายแบบสําหรับการติดตั้งและใช้งาน Cube Compact ซึ่งรวมถึงส่วนการกําหนดค่าและการตั้งค่าต่อไปนี้
ก) แผ่นยึดด้านล่าง (สําหรับยึดเครื่องเล่นแผ่นเสียงของอุปกรณ์หรือระบบติดตั้ง):
b) แท่นหมุนแบบสแตนด์อโลนที่ยึด (ยึดกับพื้นเพื่อความมั่นคงมากขึ้น):


โน้ต: ในรูปแบบนี้มีแผ่นขนาด 95 ซม. พร้อมฐานยึดกับพื้นผิวที่มั่นคง สิ่งนี้ทําให้เครื่องมีเสถียรภาพเมื่อใช้งาน โดยทํางานเพื่อป้องกันการพลิกคว่ํา กรณีการใช้งานรวมถึงการนําเสนอวัตถุขนาดเล็กและขนาดกลาง ขนาดสูงสุด 60 - 65 ซม.
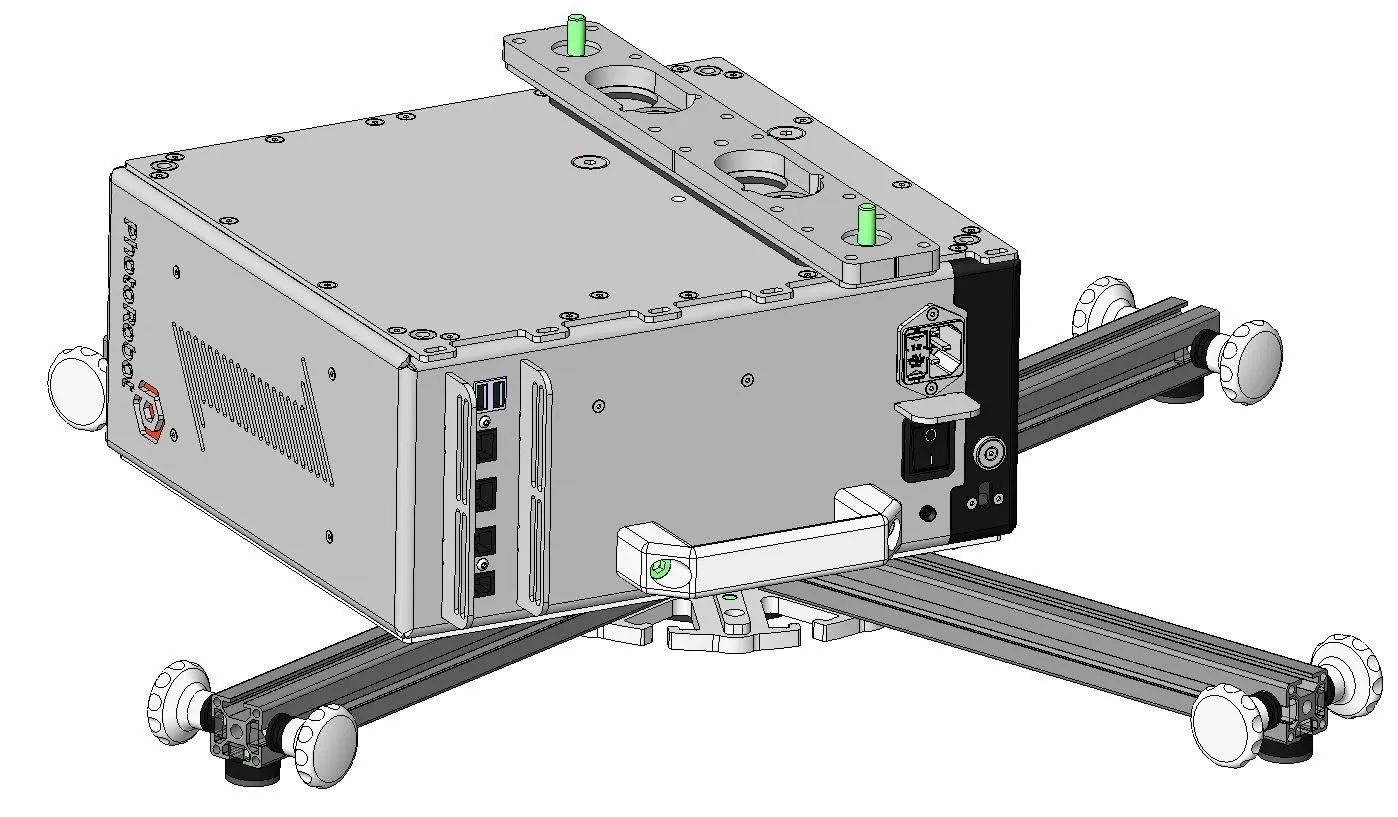
c) แท่นหมุนแบบตั้งอิสระ (พร้อมขาอุปกรณ์ที่ใช้งานอยู่):
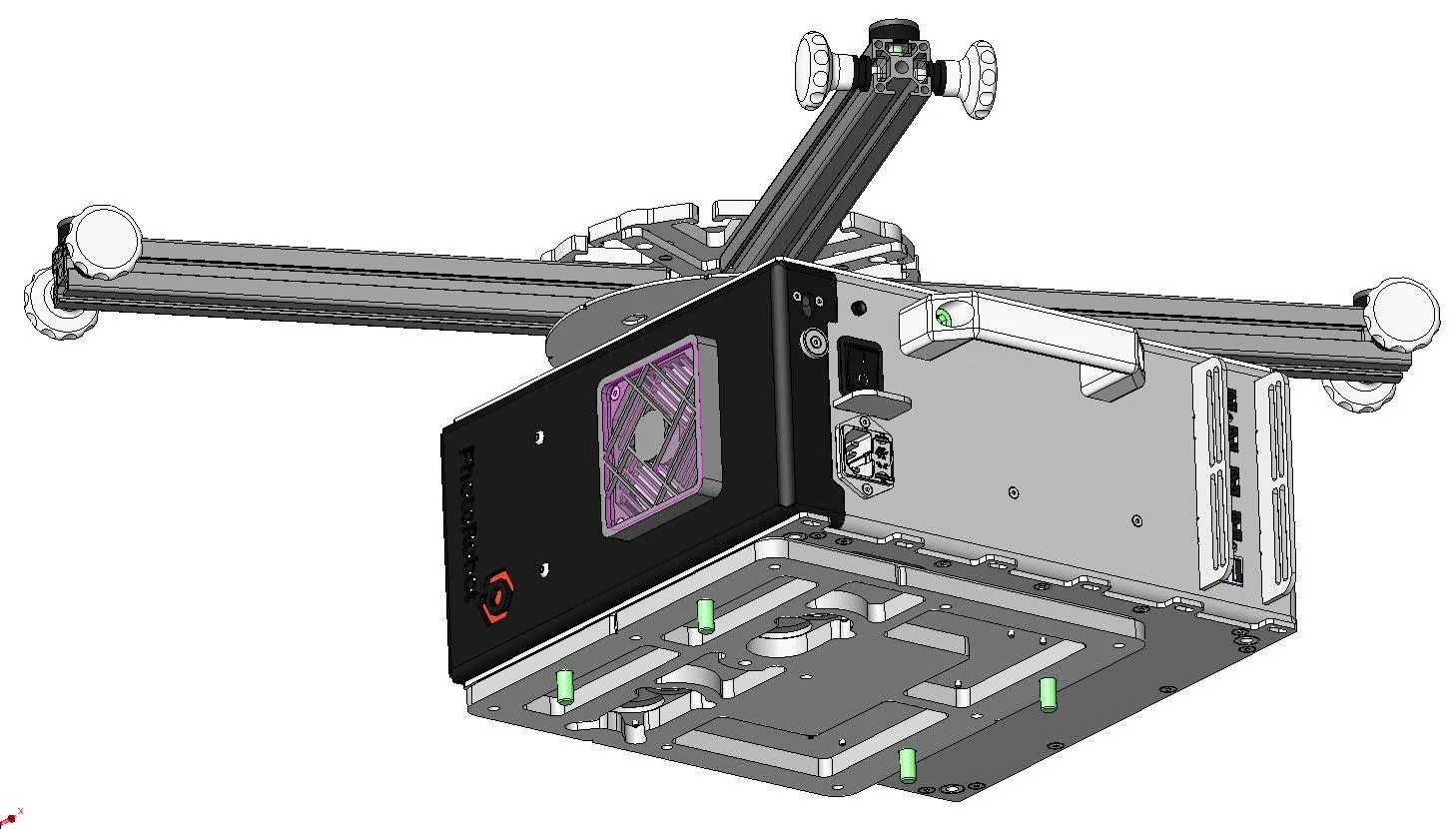
d) โหมดระบบกันสะเทือนแบบหมุน 360 องศา (ติดตั้งคว่ํากับพอร์ทัลด้านบน):




1.5. จุดหยุดฉุกเฉิน Cube Compact
หากต้องการหยุดฉุกเฉิน ให้ถอดอุปกรณ์ออกจากเครือข่ายไฟฟ้าโดยดึงสายไฟออกจากเต้ารับ
1.6. Cube V5 / V6 / การบํารุงรักษาขนาดกะทัดรัด
โปรดทราบว่าจําเป็นต้องรักษาอุปกรณ์ให้สะอาดและอยู่ในสภาพแวดล้อมที่แห้งและมีการควบคุมสภาพอากาศโดยมีอุณหภูมิคงที่ ขจัดฝุ่นด้วย adamp ผ้าและห้ามใช้สารเคมีหรือตัวทําละลายในการทําความสะอาดใดๆ
โดยการออกแบบ อุปกรณ์จะต้องได้รับการตรวจสอบและแก้ไขอย่างสม่ําเสมอตามกฎหมายท้องถิ่น อุปกรณ์ไฟฟ้าจะต้องถูกกําจัดอย่างเหมาะสมโดยการส่งมอบให้กับระบบรวบรวมขยะอิเล็กทรอนิกส์ที่กําหนดโดยกฎหมาย ท้องถิ่น
2. การใช้งานครั้งแรก - PhotoRobot Cube V5 / V6 / Compact
ก่อนใช้งาน PhotoRobot ครั้งแรก จําเป็นต้องเข้าใจแนวคิดเบื้องหลังเทคโนโลยี PhotoRobot เป็นโซลูชันแบบ all-in-one ที่ปฏิวัติวงการสําหรับระบบอัตโนมัติของการถ่ายภาพผลิตภัณฑ์และวัตถุ จากมุมมองทางเทคนิค เป็นหน่วยโมดูลาร์ที่ประกอบด้วยฮาร์ดแวร์และซอฟต์แวร์ ดังนั้นจึงจําเป็นต้องเชื่อมต่อ PhotoRobot ผ่านเครือข่ายเดียวกันกับคอมพิวเตอร์ที่ใช้งาน เครือข่ายยังต้องมีการเชื่อมต่อกับอินเทอร์เน็ตเพื่อเข้าถึงบริการ PhotoRobot ซึ่งทํางานในระบบคลาวด์ จากนั้นมีข้อกําหนดต่อไปนี้ซึ่งต้องปฏิบัติตามเสมอ
- ต้องมีชุดควบคุม PhotoRobot ที่เชื่อมต่อกับเครือข่ายท้องถิ่น
- จําเป็นต้องมีคอมพิวเตอร์เพื่อเรียกใช้ GUI บริการหรือซอฟต์แวร์ของผู้ปฏิบัติงานที่เรียกว่า _Controls
- คอมพิวเตอร์ต้องเชื่อมต่อกับเครือข่ายเดียวกันกับชุดควบคุม PhotoRobot
- เครือข่ายต้องเชื่อมต่อกับอินเทอร์เน็ต
หลังจากตรวจสอบให้แน่ใจว่าได้เชื่อมต่อ PhotoRobot กับคอมพิวเตอร์และเครือข่ายท้องถิ่นแล้ว ให้ตรวจสอบพารามิเตอร์ของระบบจําหน่ายไฟฟ้า (เช่น voltage และความถี่)
จากนั้นตรวจสอบการตั้งค่าพลังงานของชุดควบคุม ต้องเป็นไปตามพารามิเตอร์ของระบบจําหน่ายไฟฟ้าทั้งหมด หากการตั้งค่าของชุดควบคุมไม่เป็นไปตาม โปรดดูส่วนถัดไปเกี่ยวกับการตั้งค่าพลังงานของชุดควบคุม
หากเป็นไปตามข้อกําหนด ให้ดําเนินการต่อโดยเชื่อมต่อชุดควบคุมกับเครือข่ายผ่านสาย อีเทอร์เน็ต
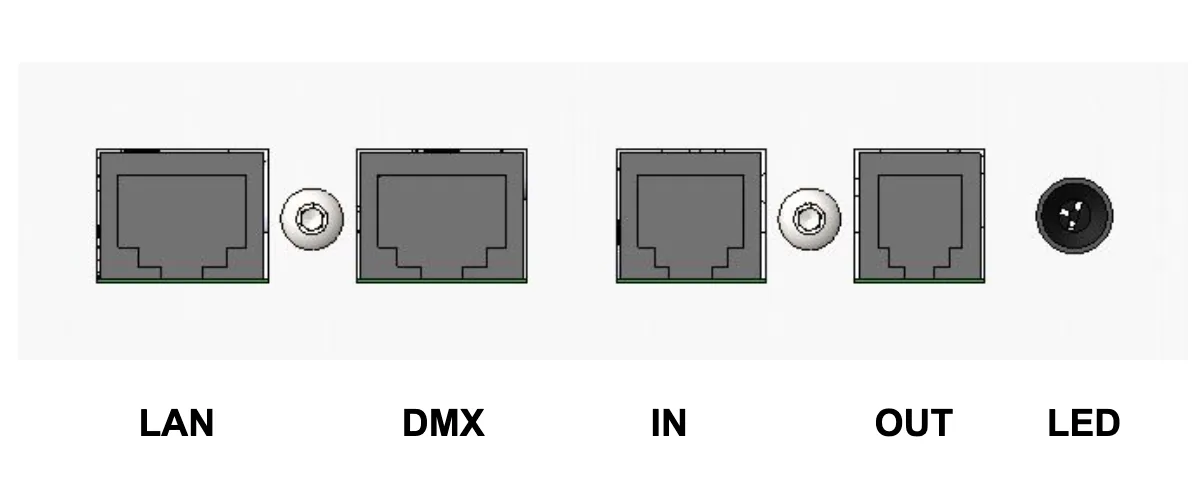
โน้ต: สําหรับรุ่น Cube V5 / V6 ชุดควบคุมเป็นอุปกรณ์แยกต่างหาก ค้นหาขั้วต่อ RJ45 ที่ด้านหลังของชุดควบคุม Cube Compact มีชุดควบคุมรวมอยู่ในเครื่อง ค้นหาขั้วต่อ RJ45 ที่ด้านหลังของหุ่นยนต์ Cube
2.1. การตั้งค่าพลังงานของชุดควบคุม
ในการตรวจสอบการตั้งค่าพลังงานของชุดควบคุม ชุดควบคุมรุ่นเก่ามีตัวเลือกแรงดันไฟฟ้าแบบแมนนวลที่ด้านหลังของอุปกรณ์

อีกทางหนึ่งชุดควบคุมรุ่นใหม่ไม่มีตัวเลือกแรงดันไฟฟ้าและมีช่วงการทํางานที่ 110V - 240V
หากไม่แน่ใจเกี่ยวกับการตั้งค่าพลังงานของชุดควบคุม โปรดติดต่อฝ่ายสนับสนุนด้านเทคนิคของ PhotoRobot เพื่อขอความช่วยเหลือจากช่างเทคนิค PhotoRobot ผู้เชี่ยวชาญ
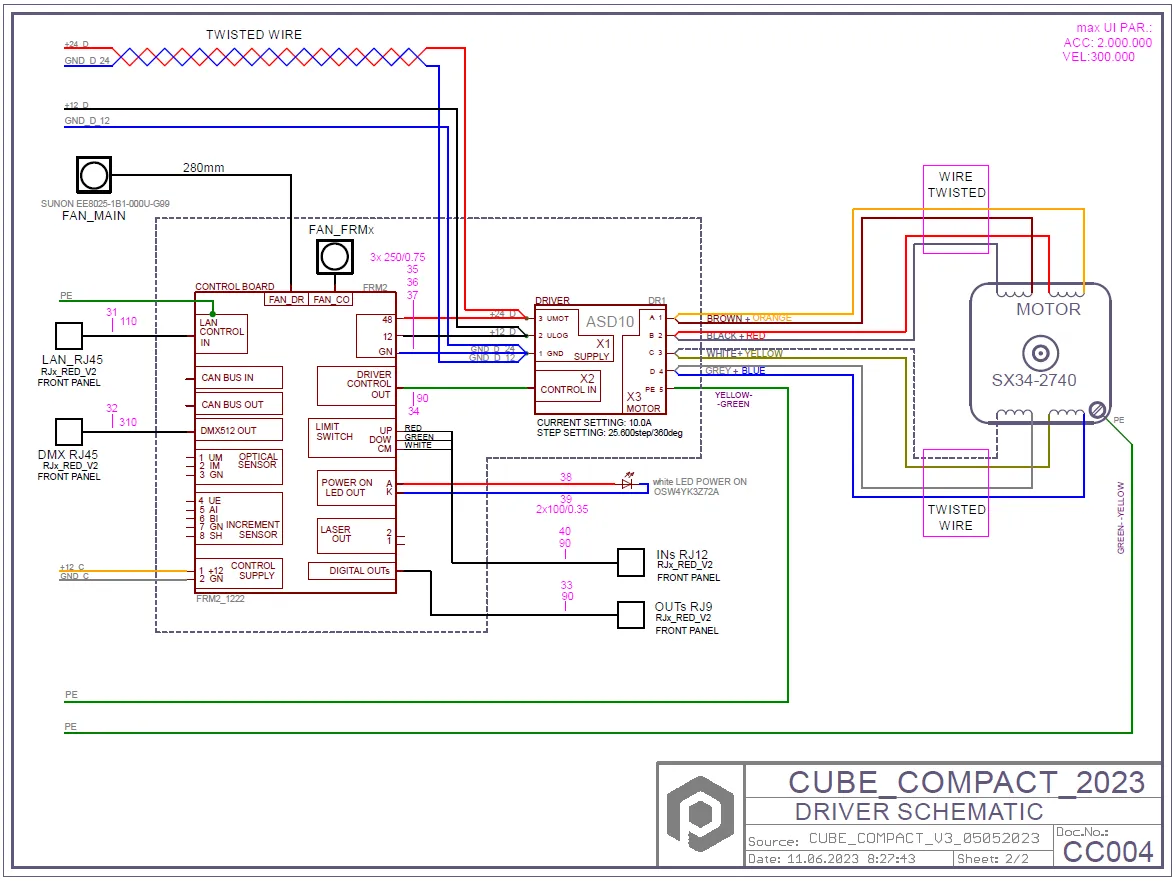
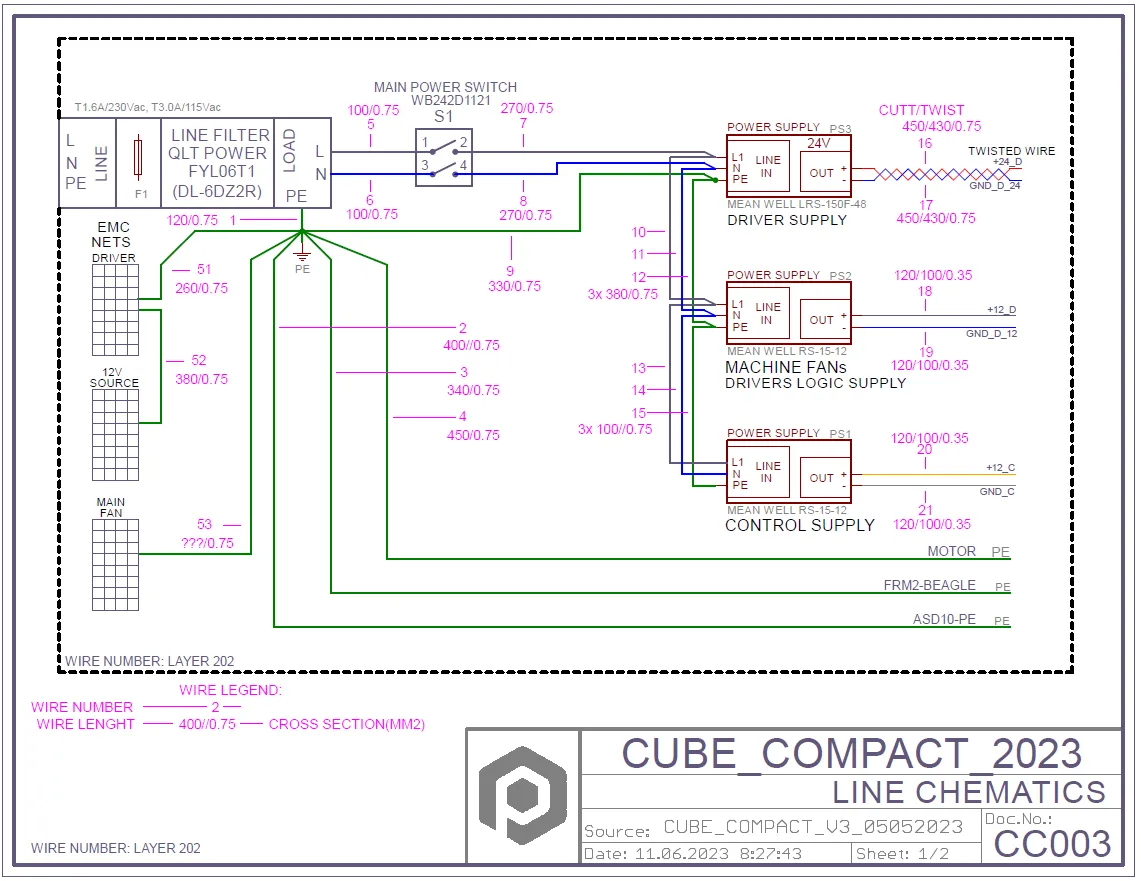
2.2. แผนภาพไฟฟ้าขนาดกะทัดรัดลูกบาศก์
2.3. การกําหนดค่าเครือข่าย
ในการกําหนดค่าเครือข่ายให้สื่อสารกับ PhotoRobot ได้อย่างถูกต้อง จะต้องปฏิบัติตามข้อกําหนดต่อไปนี้บนเครือข่าย
- เซิร์ฟเวอร์ DHCP ในเครือข่ายเป็นสิ่งจําเป็น
- ต้องอนุญาตให้มีการสื่อสารพอร์ต TCP 7777, 7778
- ต้องอนุญาตการออกอากาศ UDP บนพอร์ต 6666
- จําเป็นต้องเชื่อมต่ออินเทอร์เน็ต
- *. ต้องอนุญาตให้เข้าถึง photorobot.com
- ต้องอนุญาตให้เข้าถึง as-unirobot.azurewebsites.net
- แนะนําให้เชื่อมต่อแบบมีสายของ PhotoRobot กับ LAN
- อ้างถึงข้อกําหนดเบื้องต้นของเครือข่ายโดยละเอียดของ PhotoRobot สําหรับข้อมูลเพิ่มเติมหากจําเป็น
- เสียบปลั๊กไฟเข้ากับเต้ารับไฟฟ้า
จากนั้นกดสวิตช์หลักบนชุดควบคุมสําหรับ Cube V5 / V6 (หรือที่ด้านหลังของ Cube Compact) ไฟแสดงสถานะจะเปลี่ยนจากกะพริบเป็นไฟต่อเนื่องเพื่อส่งสัญญาณเมื่อพร้อมใช้งาน
2.4. ค้นหาที่อยู่ IP ของ PhotoRobot บน LAN
หลังจากกำหนดค่าเครือข่ายอย่างถูกต้องแล้ว จำเป็นต้องค้นหาและระบุที่อยู่ IP ของ PhotoRobot บน LAN ในการดำเนินการนี้ แอป PhotoRobot Locator ได้รับการรวมเข้ากับ CAPP โดยตรง เพื่อการค้นหาและระบุ Control Units บนเครือข่ายได้ง่ายขึ้น ตรวจสอบให้แน่ใจว่าคุณกำลังใช้ CAPP เวอร์ชันล่าสุดเพื่อเข้าถึงคุณสมบัตินี้
จากนั้น หากต้องการระบุหุ่นยนต์บนเครือข่ายโดยตรงภายใน CAPP ให้เปิด CAPP เวอร์ชันท้องถิ่น ไปที่การตั้งค่า แล้วคลิก หุ่นยนต์ / หน่วยควบคุม

เมนู Robots / Control units จะแสดงคอลัมน์ที่มี Name, Network, Unit, Version, Discovered และ Identify สำหรับหุ่นยนต์แต่ละตัว หากจุดทางด้านซ้ายของชื่อหุ่นยนต์เป็นสีเขียว แสดงว่าหุ่นยนต์ออนไลน์ การคลิกที่ช่องหุ่นยนต์จะเปิดอินเทอร์เฟซเว็บไซต์ของหุ่นยนต์ นอกจากนี้ยังจะทำให้ไฟ LED บน Control Unit ของหุ่นยนต์กะพริบเป็นสีเขียวเพื่อให้ระบุได้ง่ายขึ้น
หากลูกค้าต้องการดาวน์โหลดแอปภายนอก PhotoRobot Locator ก็มีให้ดาวน์โหลดสำหรับ iOS ภายใน PhotoRobot Account Downloads

หมายเหตุ: PhotoRobot Locator เวอร์ชัน Android ได้ถูกยกเลิกแล้ว
อีกทางเลือกหนึ่งคือมียูทิลิตี้บรรทัดคำสั่ง FRFind สำหรับ MacOS หรือ Windows เพื่อค้นหาเครือข่ายและระบุ PhotoRobot Control Units ค้นหาลิงก์สำหรับดาวน์โหลด FRFind ได้ที่หน้า PhotoRobot Account Downloads
2.5. การทดสอบขั้นพื้นฐาน - Cube V5 / V6 / Compact
ในการทดสอบ Cube V5 / V6 / Compact จากนั้นให้เปิด web เบราว์เซอร์และป้อนที่อยู่ IP ที่เชื่อมโยงกับ PhotoRobot ของคุณใน URL รูปแบบ ตัวอย่างเช่น ป้อน: https://11.22.33.44 (แต่โปรดทราบว่าที่อยู่นี้เป็นเพียงตัวอย่างเท่านั้น) หากสําเร็จ อินเทอร์เฟซผู้ใช้พื้นฐานจะเปิดขึ้น

- เปิดเครื่องยนต์ (ลูกศร 1 ด้านบน) และพยายามใช้งานส่วนที่เคลื่อนย้ายได้ของหุ่นยนต์ (ลูกศร 2 ด้านบน) หากหุ่นยนต์เคลื่อนที่ตามคําแนะนําของคุณ คุณก็พร้อมที่จะใช้อุปกรณ์ PhotoRobot เป็นประจํา
3. การประกอบลูกบาศก์ V5 / V6 และที่ยึดลําตัวหุ่น
เมื่อประกอบรุ่น Cube V5 หรือ Cube V6 โปรดทราบว่าจําเป็นต้องประกอบชุดควบคุมและชั้นวางแยกต่างหาก นี่ไม่ใช่กรณีของ Cube Compact หากใช้ Cube Compact ให้ดําเนินการต่อในส่วนการประกอบพื้นหลังกระดาษ
3.1. การประกอบแร็ค HD และชุดควบคุม (V5 / V6)
3.1.1. ในการประกอบชุดควบคุมแยกต่างหากของ Cube V5 และ Cube V6 ให้เริ่มต้นด้วยการประกอบชั้นวาง สําหรับสิ่งนี้ ให้ทําตามคําแนะนําในคู่มือที่แนบมากับกล่องชั้นวางเมื่อจัดส่ง

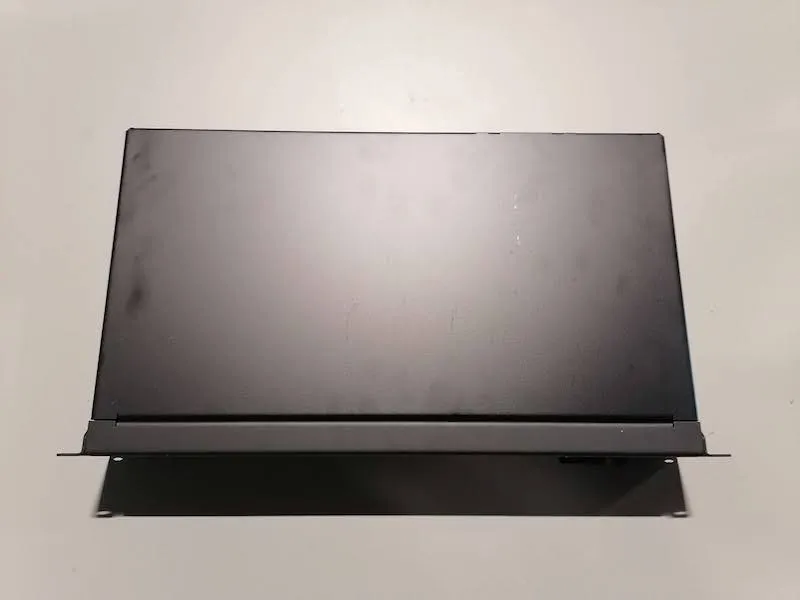
3.1.2. จากนั้น ค้นหาและแกะชุดควบคุมออกจากกล่องจัดส่งกล่อง

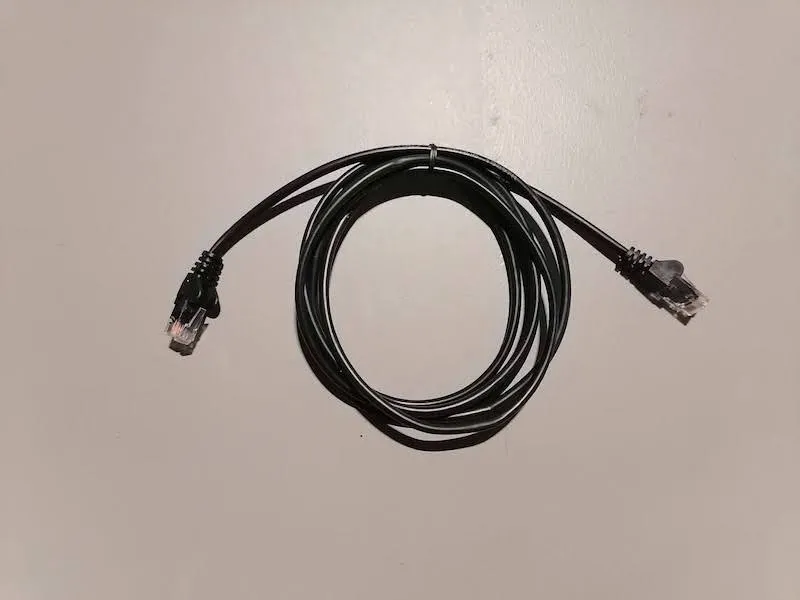
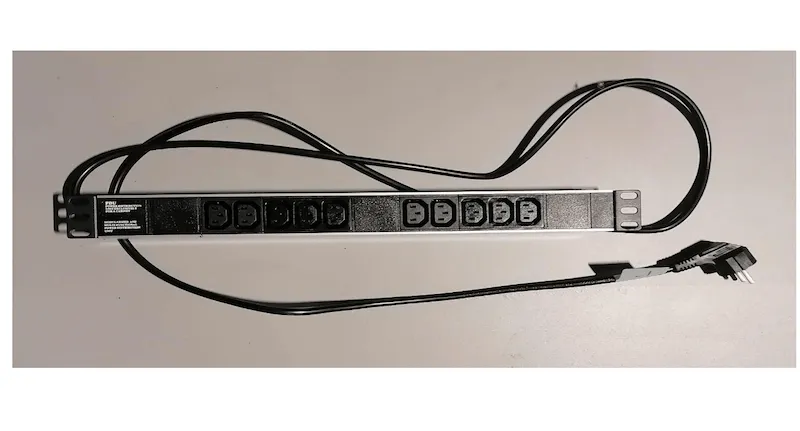
3.1.3. จากนั้นเตรียมสายเคเบิลต่อไปนี้: สายไฟ (ยาว 1 เมตร) สายชัตเตอร์ สาย มอเตอร์ และ สายอีเทอร์เน็ต (ยาว 2 เมตร)
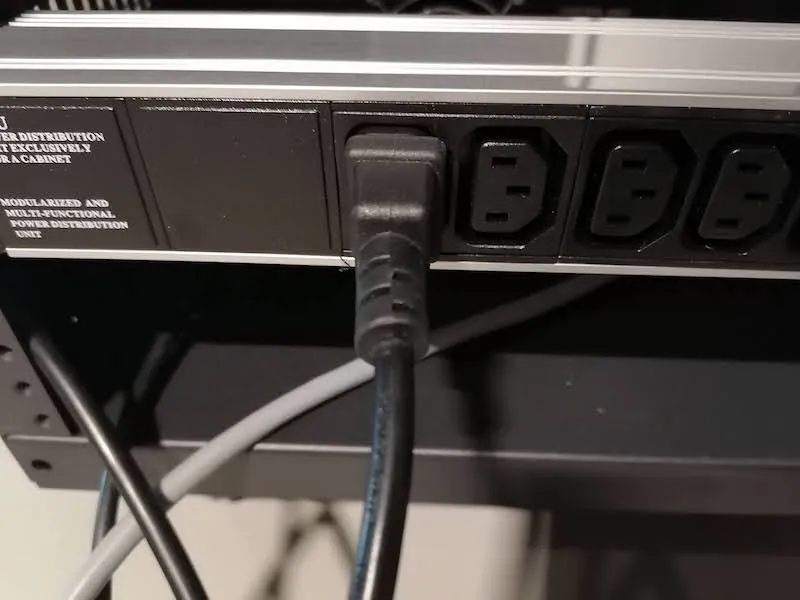
ก) สายไฟ (ยาว 1 เมตร):

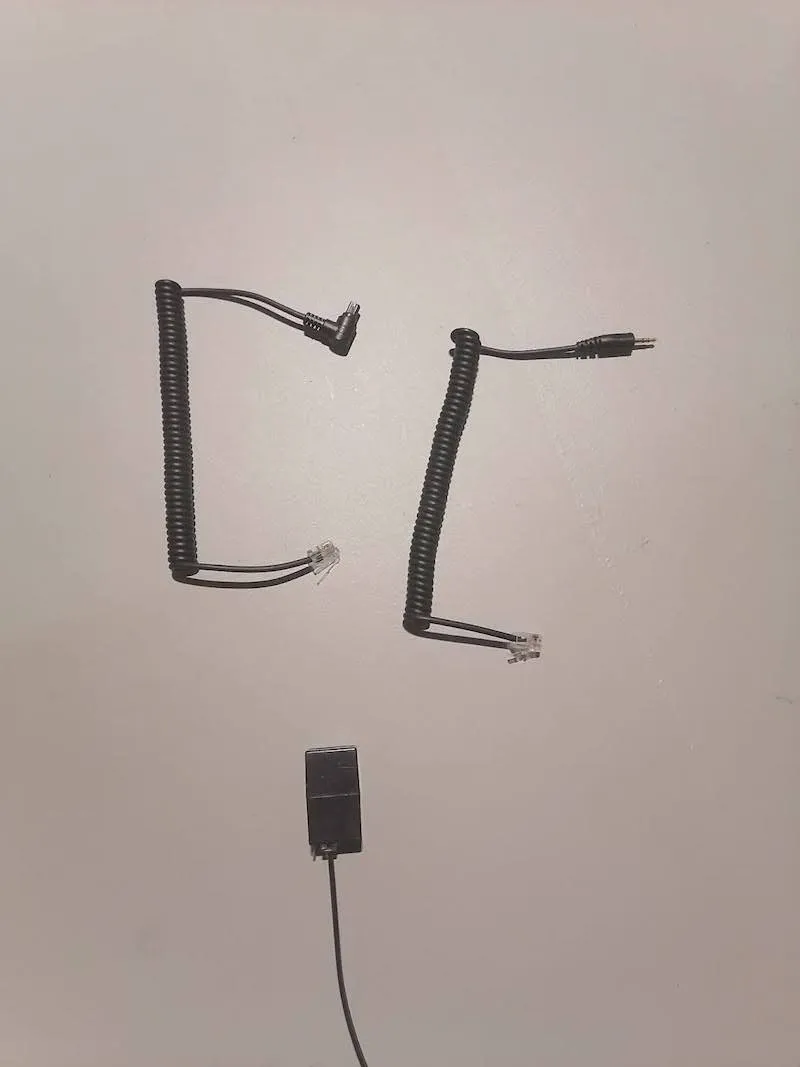
b) สายชัตเตอร์ (ยาว 1 เมตร):

c) สายมอเตอร์:

d) สายอีเทอร์เน็ต (ยาว 2 เมตร):
3.1.4. วางสายเคเบิลแต่ละเส้นที่เตรียมไว้ในขั้นตอนก่อนหน้าลงในชั้นวาง
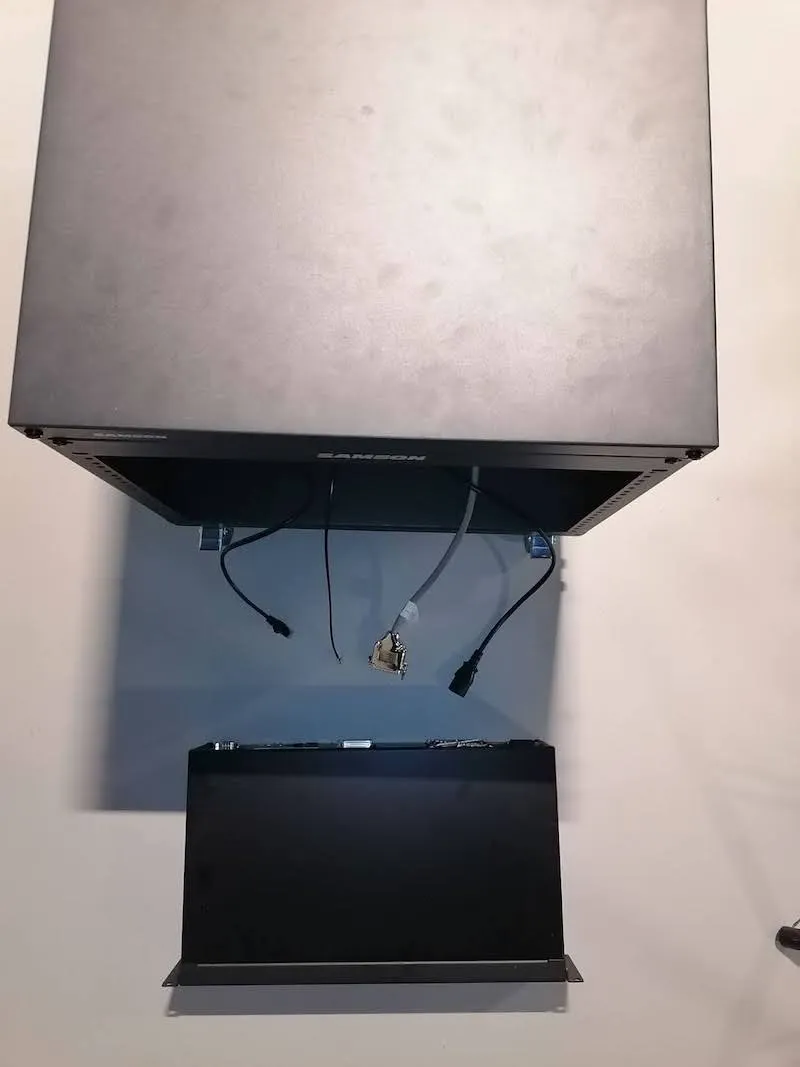
3.1.5. เชื่อมต่อสายเคเบิลจากขั้นตอนก่อนหน้าเข้ากับชุดควบคุม

สําคัญ: ต้องยึดสายมอเตอร์ให้แน่นโดยใช้สกรูสองตัวบนขั้วต่อ สายชัตเตอร์เชื่อมต่อกับพอร์ต OUT ของชุดควบคุม
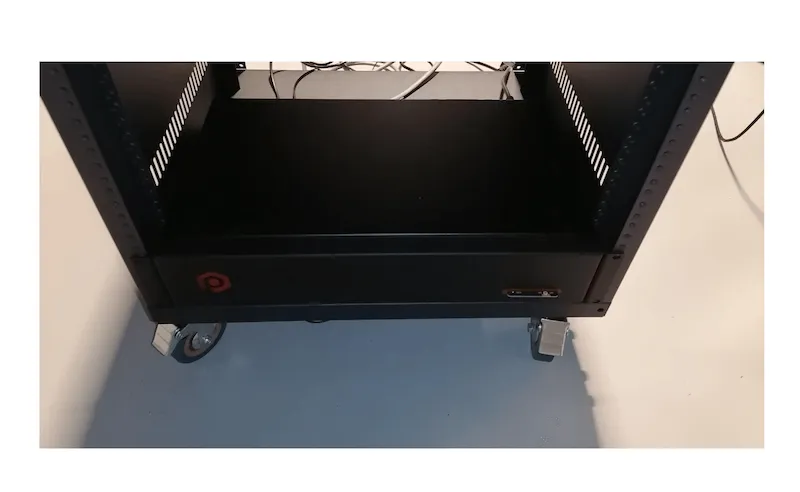
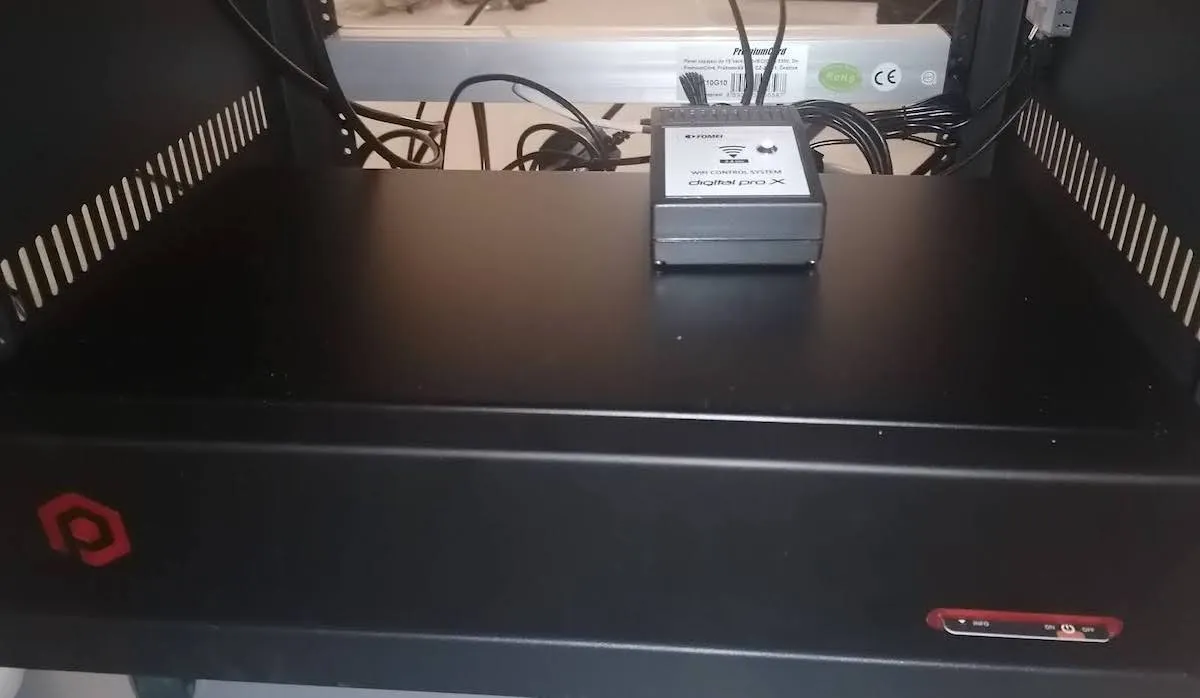
3.1.6. ใส่ชุดควบคุมลงในกล่องชั้นวาง และขันสกรูให้แน่นเพื่อปิดสนิท
3.2. การประกอบอุปกรณ์เสริมและการเชื่อมต่อ
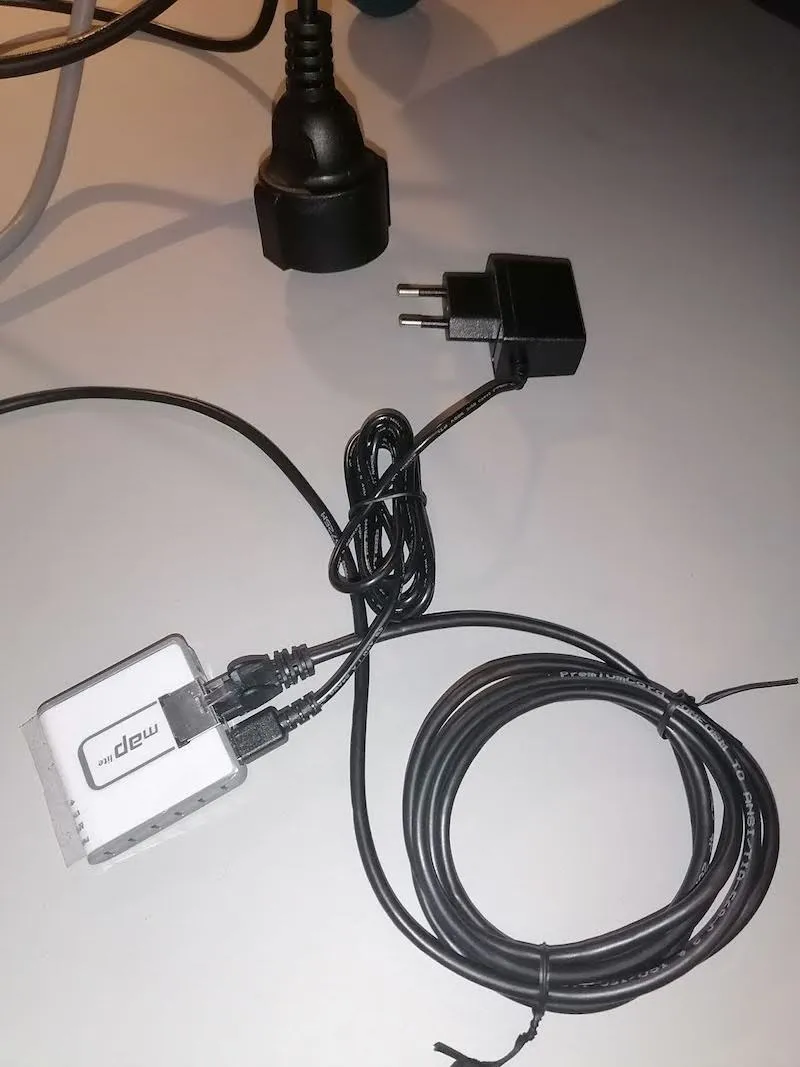
3.2.1. ในการเชื่อมต่ออุปกรณ์เสริมทั้งหมดสําหรับ Cube V5 / Cube V6 ให้เริ่มต้นด้วยการแกะเราเตอร์ออกจากกล่องกระดาษ จากนั้นติดตั้งที่ยึดชั้นวาง ต่อสายไฟหรืออะแดปเตอร์ (ขึ้นอยู่กับประเภทของเราเตอร์) และเสียบเราเตอร์ลงในเคสแร็คก่อนที่จะขันสกรูปิด

3.2.2. ยึดปลั๊กไฟหลายตัวเข้ากับส่วนล่างที่ด้านหลังของชั้นวางโดยขันให้แน่นด้วยสกรู

3.2.3. หากเราเตอร์ที่จัดส่งมีอะแดปเตอร์แปลงไฟ ให้ค้นหาอินเทอร์เฟซอะแดปเตอร์แปลงไฟและเสียบเข้ากับขั้วต่อแบบหลายซ็อกเก็ต


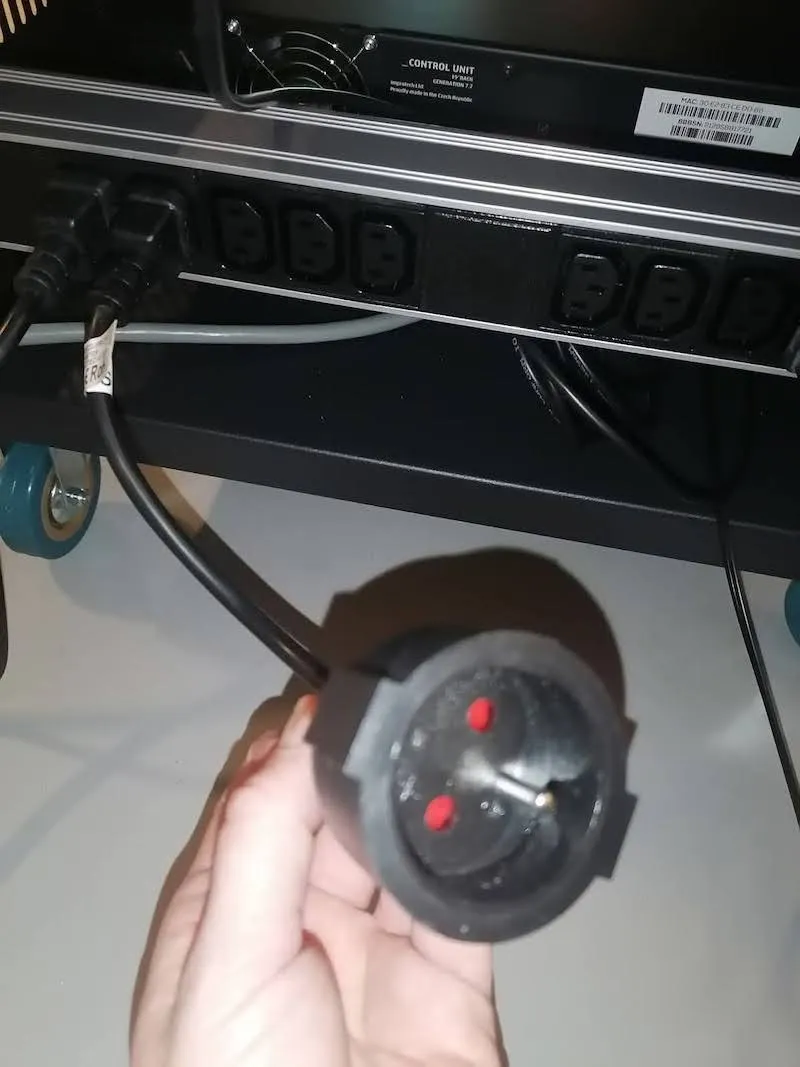

3.2.4. ค้นหาปลายสายไฟของชุดควบคุมที่ว่าง และต่อเข้ากับเต้ารับไฟฟ้าหลายตัว
3.2.5. ใช้สายอีเทอร์เน็ตที่ยาวที่สุด เสียบสายเคเบิลเข้ากับเต้ารับข้อมูลบนผนังของสตูดิโอของคุณ โปรดทราบว่าโดยค่าเริ่มต้นคาดว่าการเข้าถึงอินเทอร์เน็ตจะพร้อมใช้งานผ่านเต้ารับข้อมูลบนผนังนี้ดังนั้นที่อยู่ IP จะได้รับโดยอัตโนมัติ


3.2.6. เสียบปลายอีกด้านของสายอีเทอร์เน็ตเข้ากับพอร์ตสุดท้ายของเราเตอร์ ใช้พอร์ตหมายเลข 10 หรือพอร์ตหมายเลข 13 ขึ้นอยู่กับประเภทของเราเตอร์
3.2.7. จากนั้นเสียบปลายสายอีเทอร์เน็ตที่ว่างจากชุดควบคุมเข้ากับเราเตอร์โดยใช้หมายเลขพอร์ต 1-9
3.2.8. ค้นหาอินเทอร์เฟซอะแดปเตอร์แปลงไฟ และเสียบเข้ากับเต้ารับไฟฟ้าหลายตัว
3.2.9. แกะกล่องโมดูล Wi-Fi ออกจากกล่องกระดาษ และหาสายอีเทอร์เน็ตยาว 2 เมตรอีกเส้นเพื่อต่อเข้ากับโมดูล Wi-Fi ปลายอีกด้านของสายอีเทอร์เน็ตต่อเข้ากับเราเตอร์โดยใช้หมายเลขพอร์ต 1-9



3.2.10. ถัดไป หากใช้ไฟแฟลช Fomei ให้แกะตัวแปลง Fomei Wi-Fi และอะแดปเตอร์แปลงไฟ แล้วเชื่อมต่ออุปกรณ์ หากใช้ไฟ Broncolor โปรดดูที่ PhotoRobot - การจัดการไฟ Broncolor

3.2.11. เสียบอินเทอร์เฟซอะแดปเตอร์แปลงไฟเข้ากับเต้ารับไฟฟ้าหลายตัว จากนั้นเสียบอะแดปเตอร์ ปลายสายอีกด้านเชื่อมต่อกับเราเตอร์โดยใช้หมายเลขพอร์ต 1-9

3.2.12. ต่อปลั๊กไฟหลายเต้ารับเข้ากับเต้ารับที่ผนัง

3.2.13. ค้นหาตัวแปรเทอร์มิเนเตอร์สายชัตเตอร์ที่ผ่านไปยังรุ่นกล้องของคุณ และเสียบเข้ากับตัวเชื่อมต่อสายชัตเตอร์


3.3. การประกอบพื้นหลังกระดาษ
3.3.1. ในการประกอบพื้นหลังกระดาษ ก่อนอื่นให้หาขาตั้งไฟ Master LS 13-B สองอัน จากนั้นติดตั้งตะเกียบยึด W-2 สําหรับชุด Expander Stud ที่ด้านบนของขาตั้งแต่ละอัน



3.3.2. วางพื้นหลังกระดาษโดยตั้งสตั๊ดไว้บนตะเกียบยึดของขาตั้งกล้องทั้งสอง อันหนึ่งจะจับด้านซ้ายของพื้นหลัง และอีกอันหนึ่งจะจับด้านขวาของพื้นหลัง

3.3.3. จากนั้น ดูการบันทึก หน้าจอของการติดตั้งชุดสตั๊ด และทําซ้ําขั้นตอนในวิดีโอ

3.4. การประกอบหุ่นยนต์ Cube V5 / V6
3.4.1. ในการกําหนดค่าหุ่นยนต์ Cube ให้รองรับตัวยึดลําตัวของหุ่นแบบหมุนได้ ให้เริ่มด้วยการแกะหุ่นยนต์ออกจากกล่องและติดขาทั้งสี่เข้ากับด้านล่างของอุปกรณ์


3.4.2. จากนั้นต่อปลายอีกด้านของสายมอเตอร์เข้ากับ Cube โดยขันสกรูทั้งสองตัวบนขั้วต่อให้แน่น


3.4.3. หลังจากเชื่อมต่ออุปกรณ์แล้ว ให้วางหุ่นยนต์ Cube ลงบนพื้นตรงกลางพื้นหลังสีขาว วางลูกบาศก์ให้ห่างจากกระดาษ 1 เมตร
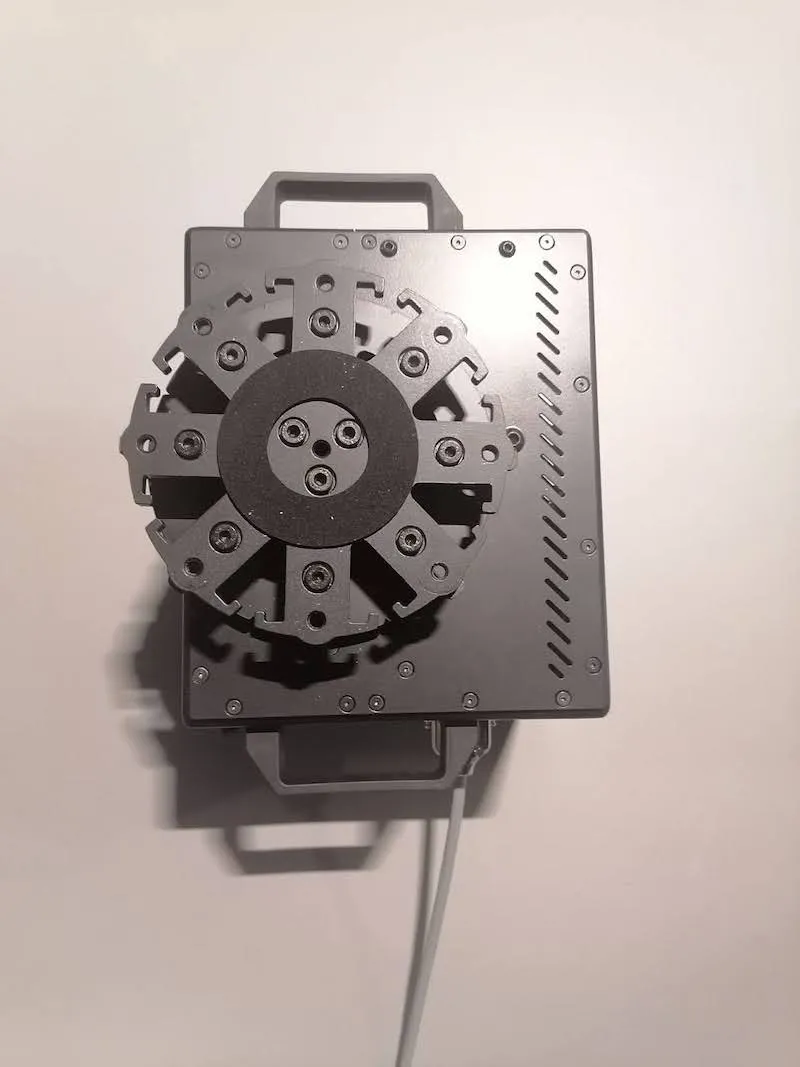

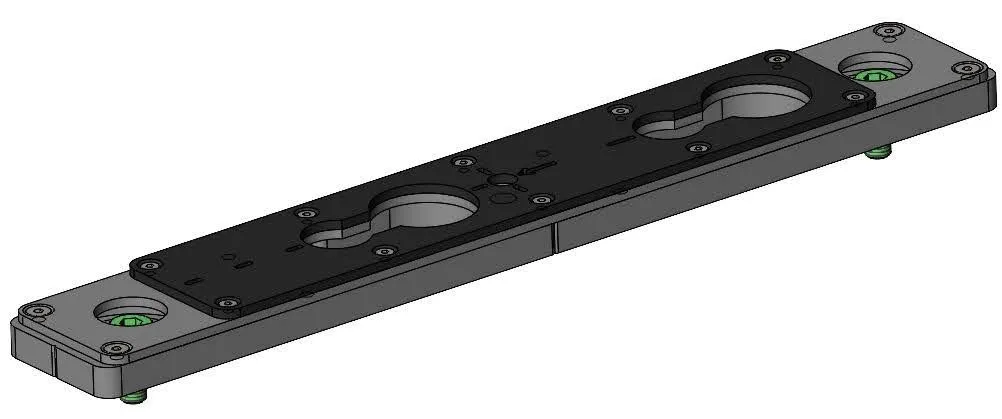
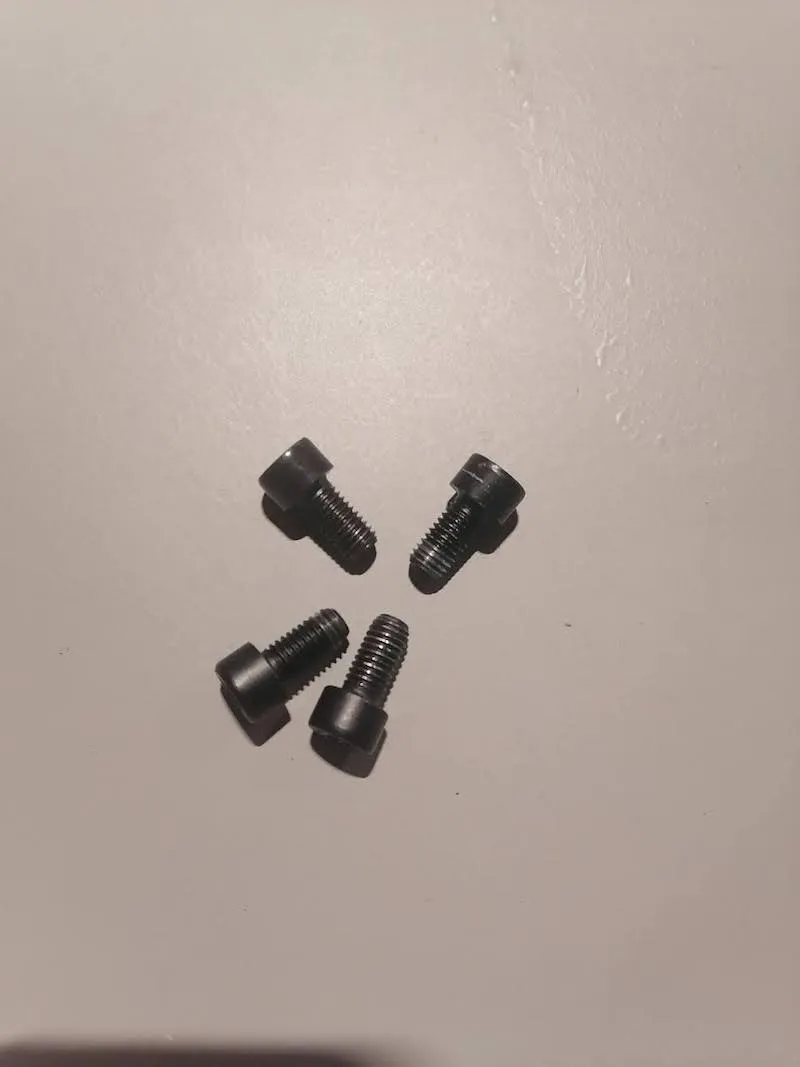
3.4.4. วางแผ่นลดขนาดสําหรับตัวยึดลําตัวไว้ที่ด้านบนของหุ่นยนต์ Cube และยึดให้เข้าที่ด้วยสกรูสี่ตัวที่ให้มา
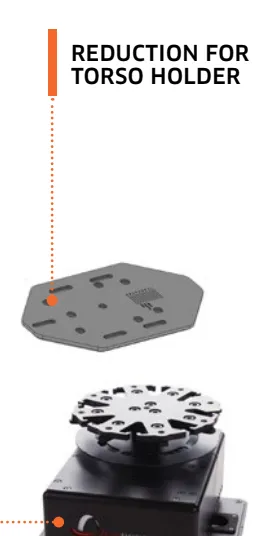
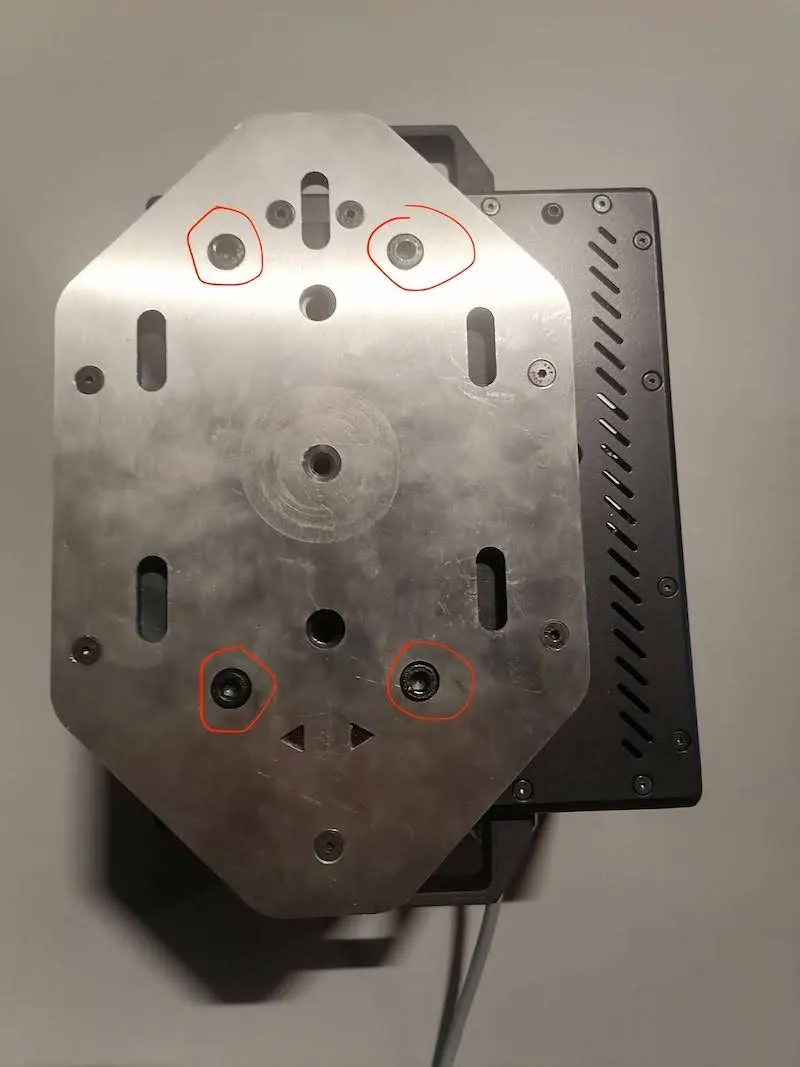
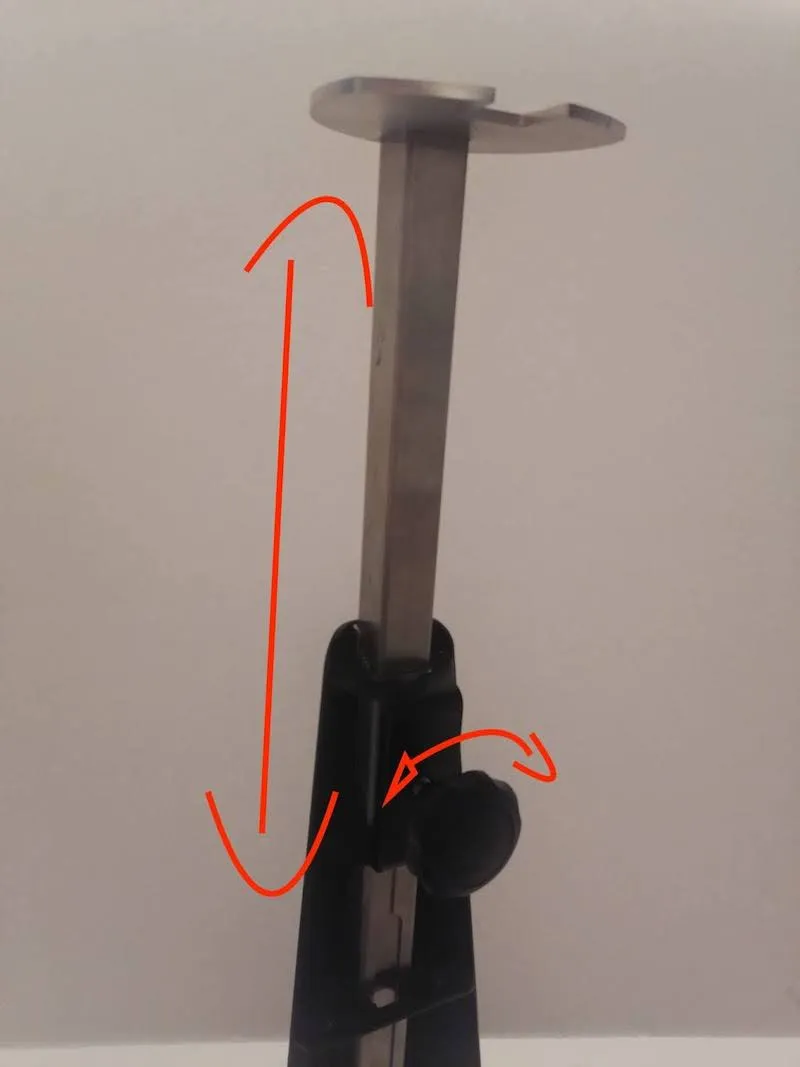
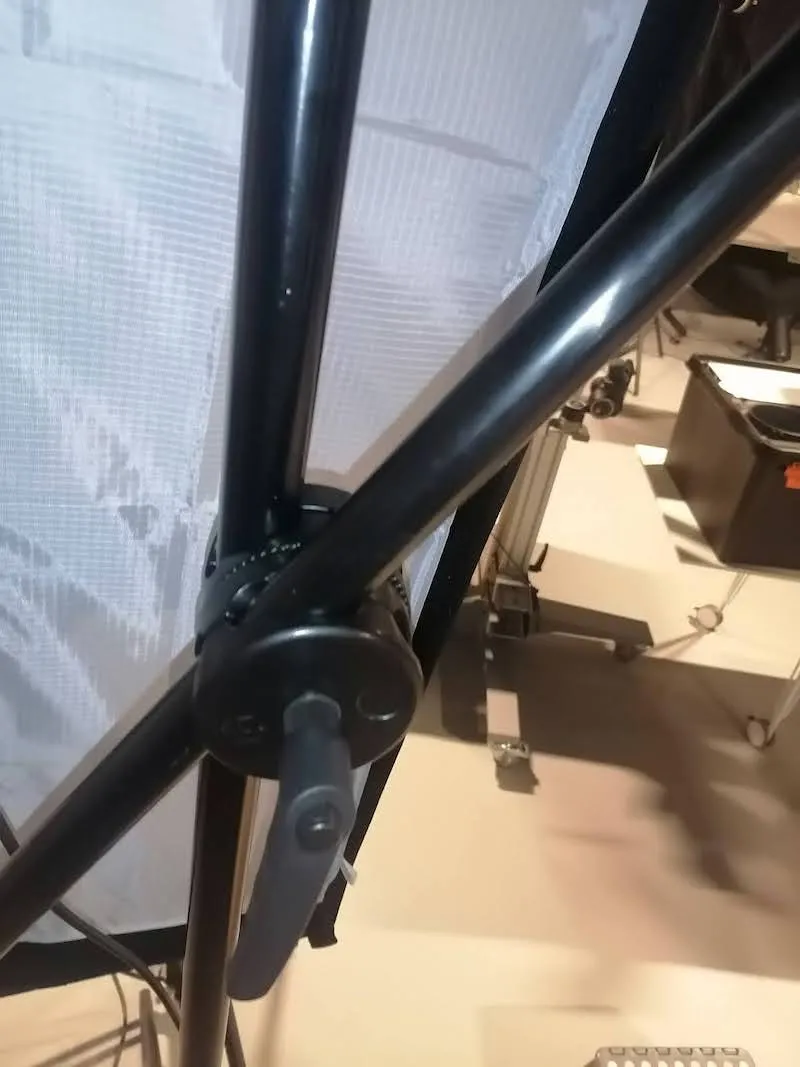
3.4.5. วางตัวของตัวยึดลําตัวเข้ากับแผ่นลด และยึดที่ยึดลําตัวให้เข้าที่โดยใช้สกรูมือขนาดใหญ่


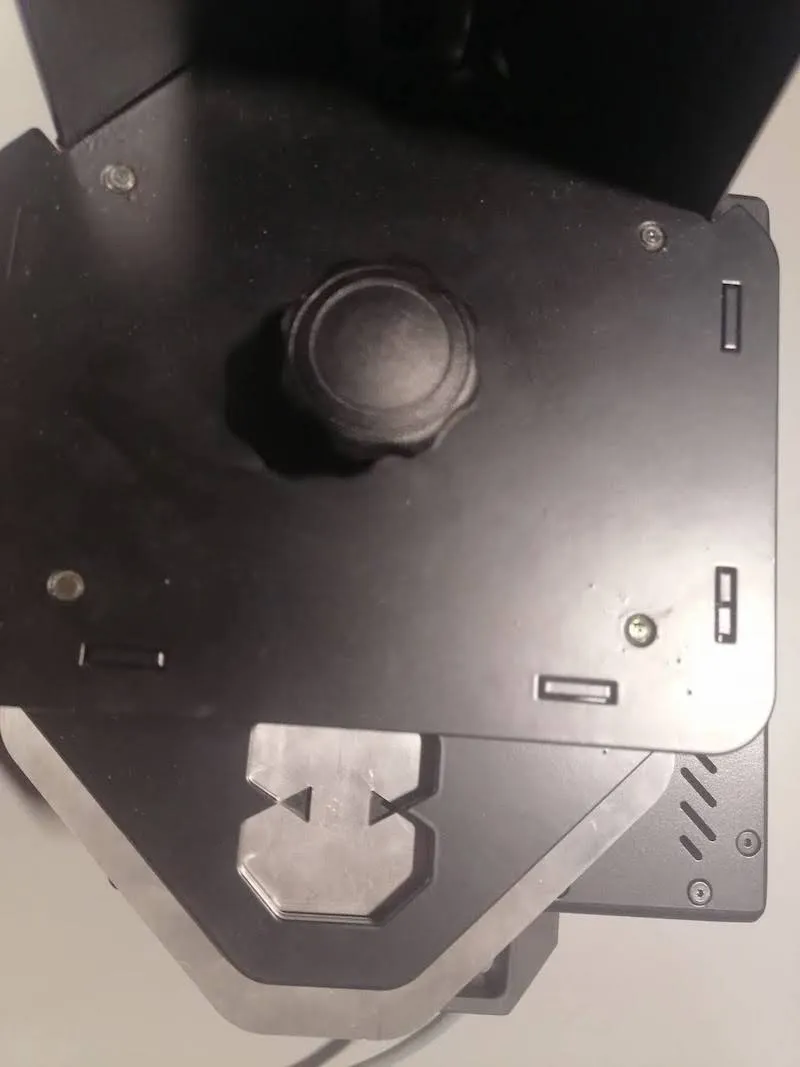
สําคัญ: จําเป็นต้องใส่ใจกับขั้นตอนนี้อย่างระมัดระวัง ตรวจสอบให้แน่ใจว่ามองเห็นสัญลักษณ์สามเหลี่ยมจากแผ่นลดผ่านตัวยึดลําตัว ซึ่งหมายความว่าติดตั้งที่ยึดลําตัวอย่างถูกต้อง
3.4.6. ณ จุดนี้ โปรดทราบว่าความสูงของลําตัวสามารถปรับได้โดยการคลายและขันสกรูมือให้แน่น และเลื่อนส่วนขยายให้สูงขึ้นหรือต่ําลง
3.5. การตั้งค่าไฟแฟลช
3.5.1. ในการตั้งค่าไฟแฟลชด้วยหุ่นยนต์ Cube ก่อนอื่นให้แกะไฟแฟลชออกจากกล่อง จากนั้นใส่หลอดไฟนําร่องลงในไฟแฟลชแต่ละดวง


โน้ต: ในการใส่หลอดไฟนําร่อง ให้คลายเกลียวกระจกออกจากแหล่งจ่ายไฟหลักอย่างระมัดระวัง จากนั้นทําเช่นเดียวกันกับตัวป้องกันกระจกจากหลอดไฟหลักก่อนที่จะนําหลอดไฟนําร่องออกจากกล่องกระดาษ อย่าลืมใช้ผ้าเช็ดปากหรือผ้าเมื่อจับหลอดไฟนําร่อง มิฉะนั้น อายุการใช้งานอาจลดลงอย่างมาก จากนั้นใส่หลอดไฟนําร่องเข้ากับจุดเชื่อมต่อในตําแหน่งที่แน่นอนดังในภาพต่อไปนี้




เมื่อพร้อมแล้ว อย่าลืมใส่ตัวป้องกันกระจกกลับเข้าไปใหม่ แล้วทําซ้ําขั้นตอนก่อนหน้าเพื่อประกอบไฟแต่ละดวง

3.5.2. หลังจากติดตั้งหลอดไฟนําร่องและเปลี่ยนตัวป้องกันกระจกแล้ว ให้ต่อสายไฟเข้ากับไฟแฟลชทั้งหมด


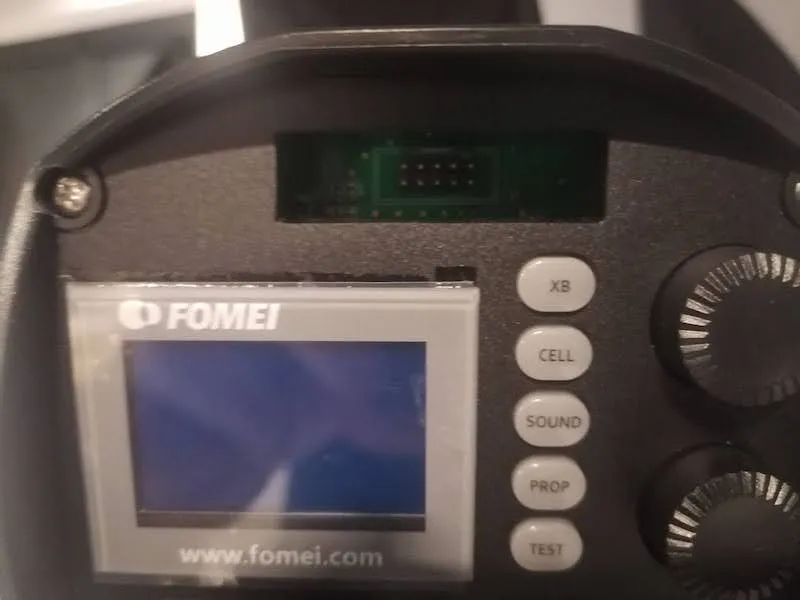
3.5.3. จากนั้นใส่เครื่องรับลงในไฟแต่ละดวง และคํานึงถึงฉลาก FOMEI สําหรับการวางแนว


3.5.4. เสียบปลายสายไฟที่ว่างจากไฟเข้ากับเต้ารับไฟฟ้าหลายตัว


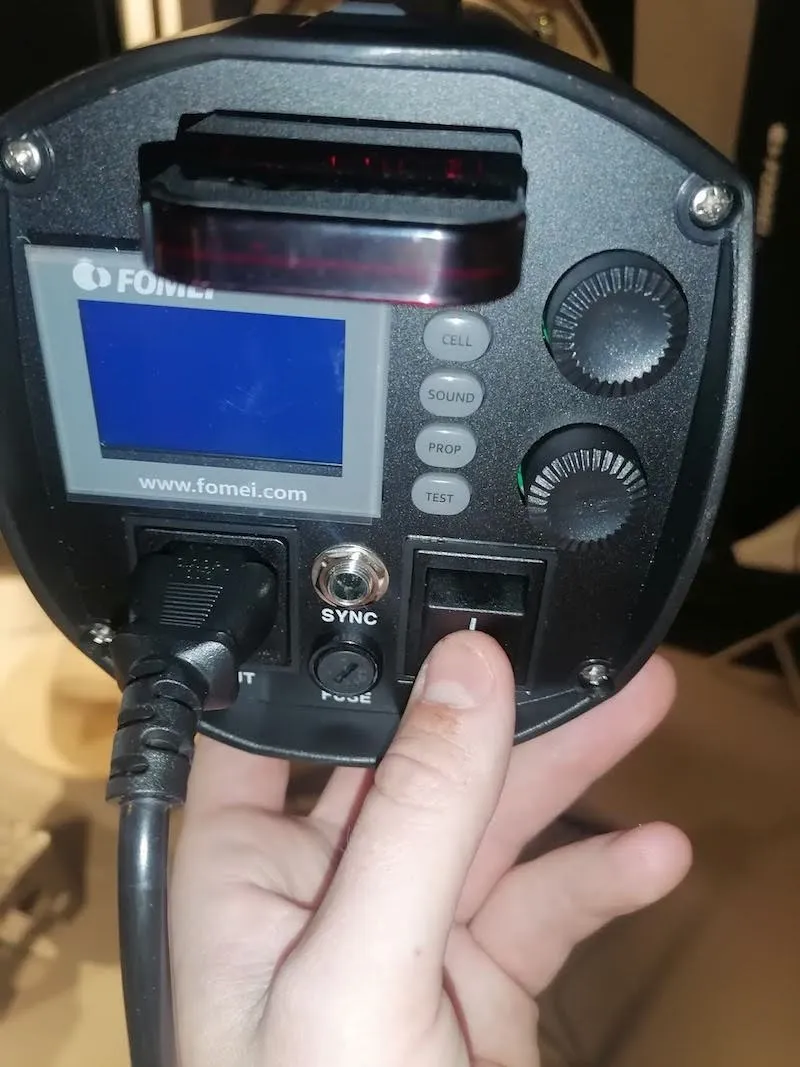
3.5.5. เปิดไฟแฟลชทั้งหมด

3.5.6. วางตําแหน่งไฟรอบๆ หุ่นยนต์ในการตั้งค่าไฟที่แนะนําต่อไปนี้
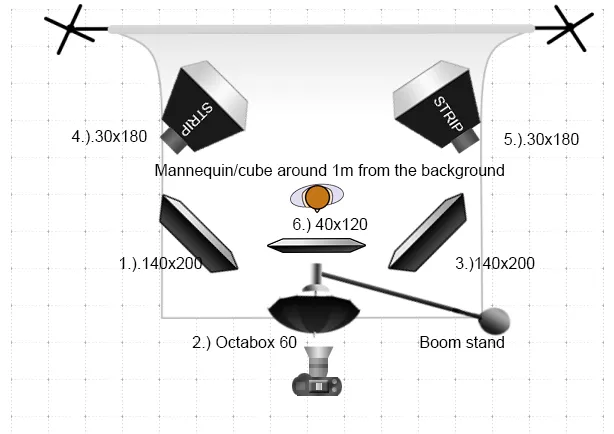
3.5.7. โปรดทราบว่าหากมีการติดตั้งขาตั้งบูมตามการตั้งค่าไฟที่แนะนํา จะต้องสร้างขาตั้งบูมก่อน ในการสร้างขาตั้งบูม คุณจะต้องมีขาตั้งกล้อง เสาบูมติดผนัง 1.5 เมตร และชุดบูมติดผนัง



นอกจากนี้ โปรดดูภาพต่อไปนี้สําหรับการสร้างขาตั้งบูม
ก) แคลมป์เสาบูมผนัง:
b) ปรับสมดุลน้ําหนักที่ปลายเสาเพื่อรองรับแสง:

c) ภาพประกอบของบูมที่สร้างขึ้น:

4. ซอฟต์แวร์ PhotoRobot _Controls
ซอฟต์แวร์ PhotoRobot _Controls App ให้การควบคุมเวิร์กสเตชันหุ่นยนต์ Cube V5 / V6 / Compact ทั้งหมด ซึ่งรวมถึงการควบคุมระยะไกลของหุ่นยนต์ กล้อง และแสงสว่างทั้งหมด ซอฟต์แวร์จัดการเวิร์กโฟลว์และจัดเตรียมฟังก์ชันที่จําเป็นสําหรับระบบอัตโนมัติที่มีประสิทธิภาพในด้านการประมวลผลภายหลัง
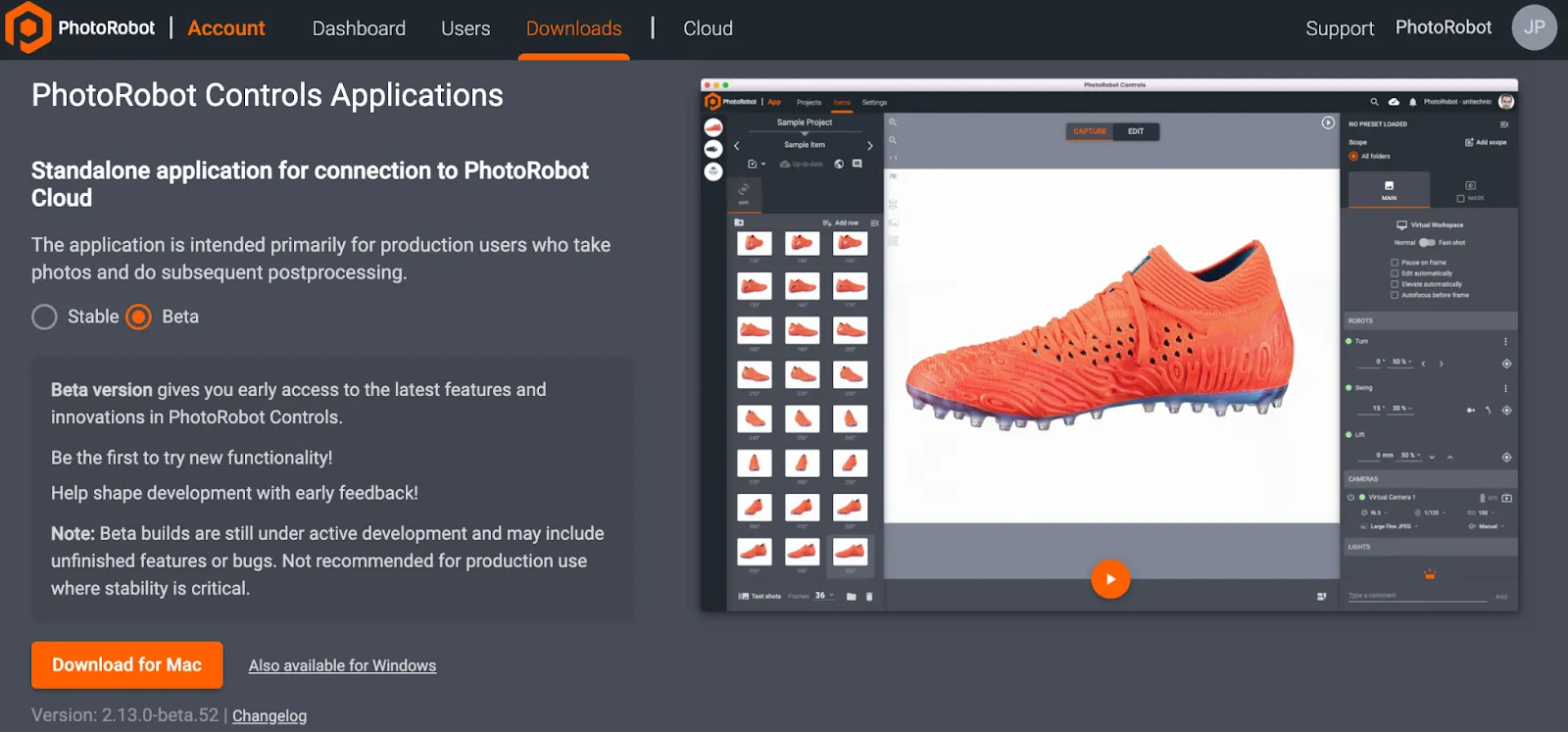
ซอฟต์แวร์ PhotoRobot _Controls App พร้อมให้ดาวน์โหลดผ่านบัญชี PhotoRobot ของคุณ ไม่รวมอยู่ในการจัดส่งเครื่อง ซอฟต์แวร์ PhotoRobot _Controls App ซื้อแยกต่างหากจากเครื่อง
นอกจากนี้ หลังจากเริ่มแอปพลิเคชันซอฟต์แวร์แล้ว โปรดทราบว่าอินเทอร์เฟซอาจเริ่มทํางานโดยอัตโนมัติใน "โหมดวิซาร์ด" โหมดวิซาร์ดเป็นส่วนต่อประสานผู้ใช้ที่เรียบง่าย ตัวอย่างเช่น การสแกนบาร์โค้ดเพื่อระบุวัตถุและเริ่มลําดับการจับภาพและหลังการประมวลผลโดยอัตโนมัติ
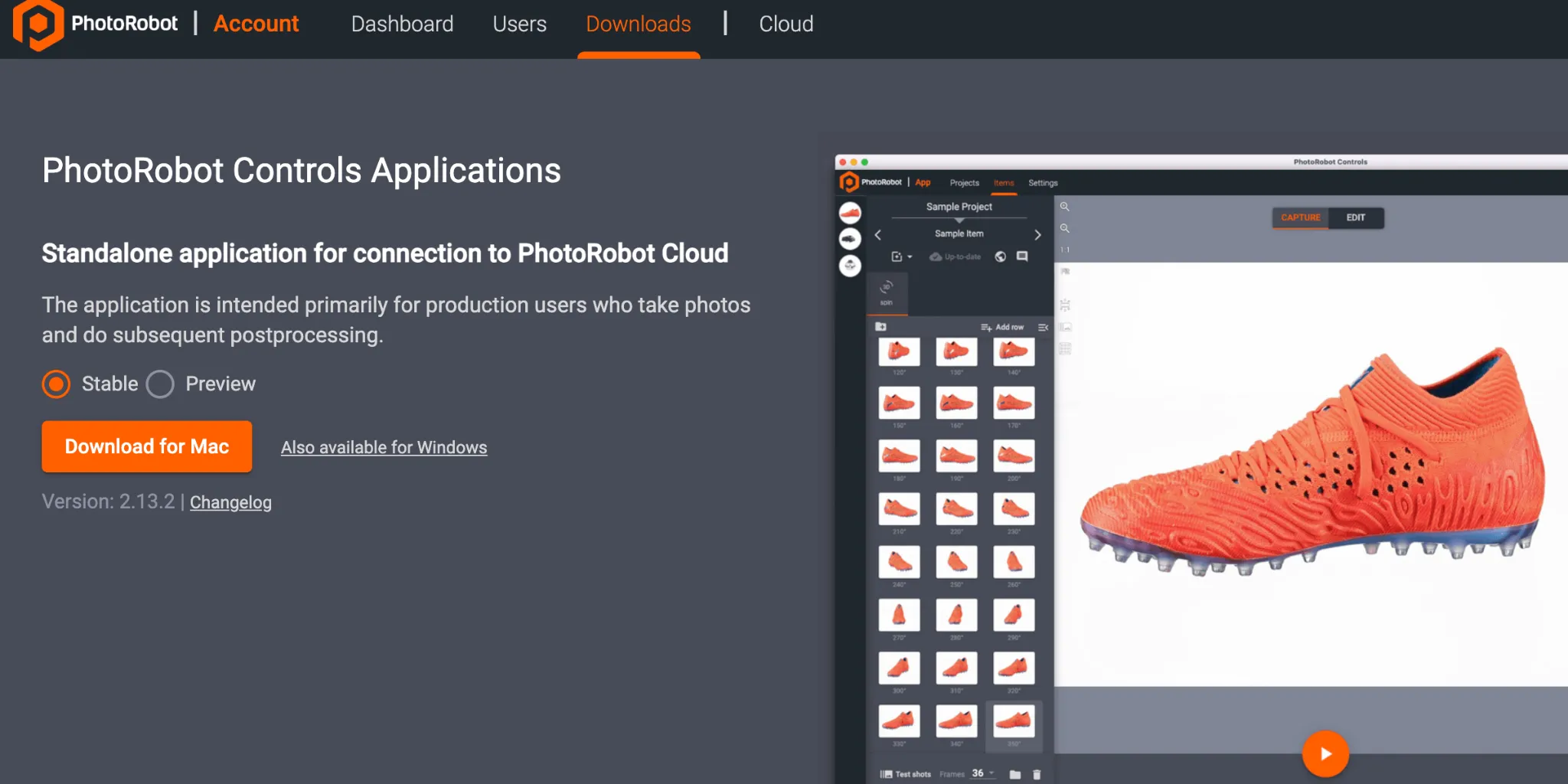
โน้ต: ทั้ง เวอร์ชันเสถียร และเวอร์ชัน ตัวอย่างของ CAPP พร้อมให้ดาวน์โหลดผ่านวิซาร์ดตัวติดตั้ง เวอร์ชันเสถียรประกอบด้วย CAPP เวอร์ชันล่าสุด และได้รับการเผยแพร่เวอร์ชันบ่อยครั้ง ในขณะเดียวกัน CAPP เวอร์ชันตัวอย่างให้การเข้าถึงคุณสมบัติและการแก้ไขล่าสุดก่อนใคร ซึ่งจะถ่ายโอนไปยังเวอร์ชันเสถียรภายในไม่กี่วันของการพัฒนา ซึ่งช่วยให้ผู้ใช้สามารถทดสอบปัญหาใดๆ ที่เกิดขึ้นในเวอร์ชันตัวอย่างก่อนที่จะติดต่อฝ่ายสนับสนุน เนื่องจากปัญหาที่รายงานส่วนใหญ่ในเวอร์ชันเสถียรได้รับการแก้ไขแล้วในเวอร์ชันตัวอย่าง อย่างไรก็ตาม โปรดทราบว่าไม่แนะนําให้ใช้เวอร์ชันตัวอย่างสําหรับการใช้งานจริงซึ่งความเสถียรเป็นปัจจัยสําคัญ เวอร์ชันตัวอย่างอยู่ระหว่างการพัฒนา ซึ่งอาจยังคงมีคุณสมบัติที่ไม่สมบูรณ์หรือข้อบกพร่องที่ยังไม่ได้รับการแก้ไข
สําคัญ: CAPP เวอร์ชันเก่าไม่ได้มีไว้สําหรับลูกค้าหรือการแจกจ่ายสาธารณะเนื่องจากความเสี่ยงที่ฐานข้อมูลจะเสียหาย CAPP เวอร์ชันเก่าสามารถเข้าถึงได้เฉพาะช่างเทคนิค PhotoRobot ที่ได้รับอนุญาตสําหรับการพัฒนาภายในหรือสําหรับกรณีการใช้งานพิเศษอย่างยิ่ง หากต้องการค้นหาเวอร์ชันเสถียรล่าสุดและเวอร์ชันตัวอย่างของ CAPP โปรดดูที่ CAPP เวอร์ชัน ดาวน์โหลดล่าสุด
สําหรับการสนับสนุนหรือการแก้ไขปัญหาของแอป PhotoRobot _Controls โปรดดูที่ PhotoRobot เริ่มต้นใช้งาน
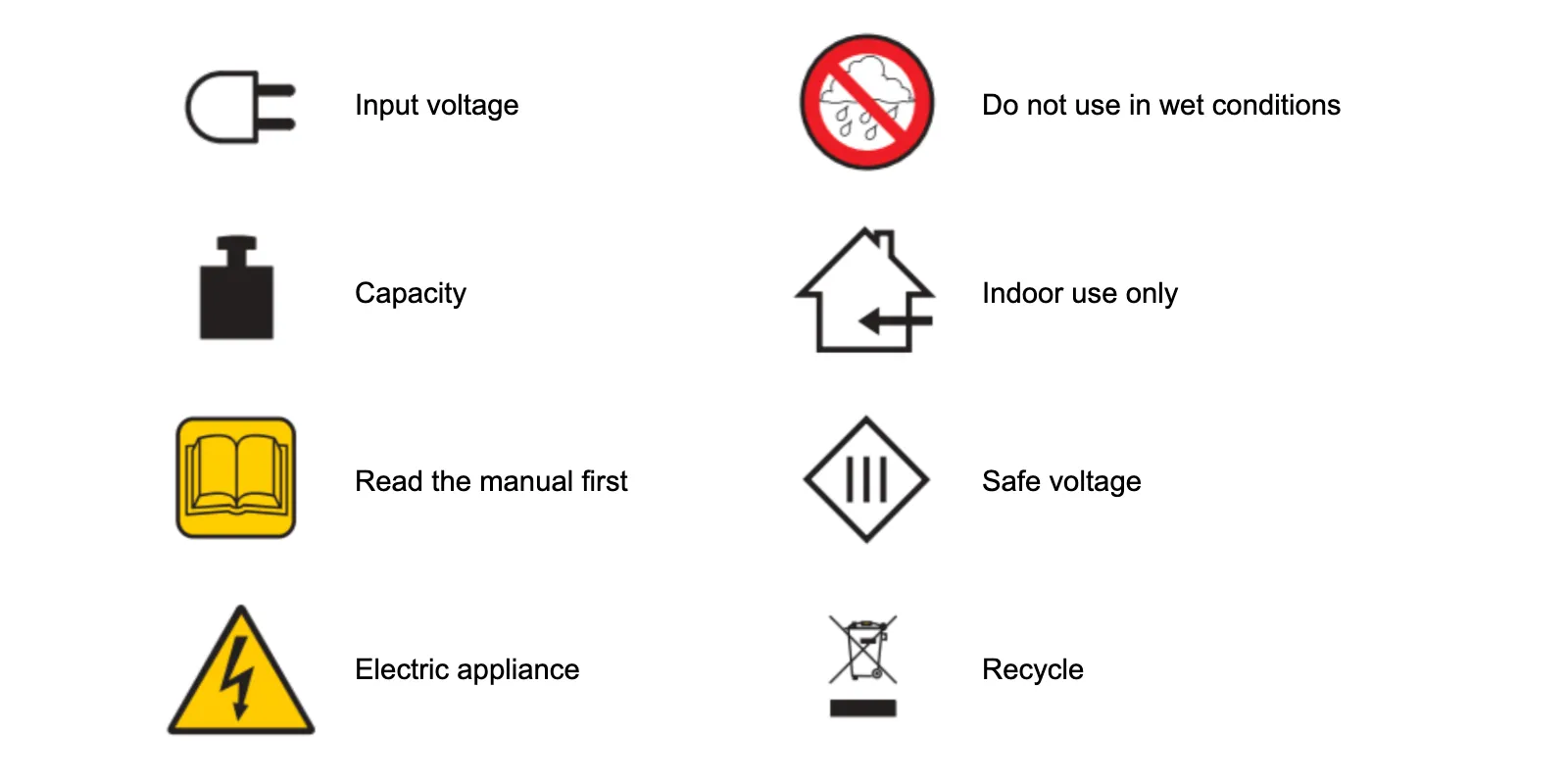
5. ฉลากข้อมูล
5.1. สัญลักษณ์โอเวอร์ view
5.2. ฉลากลูกบาศก์ขนาดกะทัดรัด



EOS Rebel ซีรีส์


EOS DSLR ซีรี่ส์


EOS M ซีรีส์มิเรอร์เลส


ซีรีส์ PowerShot


โคลสอัพ / มือถือ

Canon EOS Rebel Series นําเสนอกล้อง DSLR ที่เป็นมิตรกับผู้เริ่มต้น ด้วยคุณภาพของภาพที่มั่นคง การควบคุมที่ใช้งานง่าย และคุณสมบัติที่หลากหลาย กล้องเหล่านี้เหมาะอย่างยิ่งสําหรับผู้ที่ชื่นชอบการถ่ายภาพ ให้โฟกัสอัตโนมัติที่เชื่อถือได้ หน้าจอสัมผัสแบบปรับมุมได้ และการบันทึกวิดีโอ Full HD หรือ 4K
การเชื่อมต่อ
ความละเอียด (MP)
มติ
Canon EOS DSLR Series ให้ภาพคุณภาพสูง ออโต้โฟกัสที่รวดเร็ว และความอเนกประสงค์ ทําให้เหมาะสําหรับทั้งการถ่ายภาพและการผลิตวิดีโอ
การเชื่อมต่อ
ความละเอียด (MP)
มติ
Canon EOS M Mirrorless Series ผสมผสานการออกแบบที่กะทัดรัดเข้ากับประสิทธิภาพที่เหมือนกล้อง DSLR กล้องเหล่านี้มีเลนส์แบบเปลี่ยนได้ โฟกัสอัตโนมัติที่รวดเร็ว และเซ็นเซอร์ภาพคุณภาพสูง จึงเหมาะสําหรับนักเดินทางและผู้สร้างเนื้อหาที่ต้องการพกพาโดยไม่ลดทอนคุณภาพของภาพ
การเชื่อมต่อ
ความละเอียด (MP)
มติ
Canon PowerShot Series นําเสนอกล้องขนาดกะทัดรัดที่ใช้งานง่ายสําหรับผู้ที่ชื่นชอบการถ่ายภาพทั่วไป ด้วยรุ่นต่างๆ ตั้งแต่กล้องเล็งแล้วถ่ายภาพแบบธรรมดาไปจนถึงกล้องซูมขั้นสูง ให้ความสะดวกสบาย คุณภาพของภาพที่มั่นคง และคุณสมบัติต่างๆ เช่น ระบบป้องกันภาพสั่นและวิดีโอ 4K
การเชื่อมต่อ
ความละเอียด (MP)
มติ
กล้องโคลสอัพและกล้องมือถือของ Canon ได้รับการออกแบบมาสําหรับการถ่ายภาพและวิดีโอที่มีรายละเอียดและระยะใกล้ ขนาดกะทัดรัดและใช้งานง่าย ให้โฟกัสที่แม่นยํา การถ่ายภาพความละเอียดสูง และความสามารถด้านมาโครที่หลากหลาย เหมาะสําหรับวิดีโอบล็อก การถ่ายภาพผลิตภัณฑ์ และการถ่ายภาพระยะใกล้ที่สร้างสรรค์
การเชื่อมต่อ
ความละเอียด (MP)
มติ


