เริ่มต้นใช้งาน - การสนับสนุนผู้ใช้PhotoRobot
แอป PhotoRobot Controls (ต่อไปนี้จะเรียกว่า “CAPP”) ได้รับการออกแบบมาเพื่อทำให้กระบวนการผลิตเนื้อหาเป็นไปโดยอัตโนมัติ (รูปภาพ, วิดีโอ, 360 องศา และโมเดล 3 มิติ) คู่มือนี้ประกอบด้วย 4 ส่วน ซึ่งแต่ละส่วนแสดงถึงกระบวนการ
- SETUP - สร้างพื้นที่ทำงาน: กล้อง, ฮาร์ดแวร์ และโปรเจกต์
- CAPTURE - ควบคุมฮาร์ดแวร์และกล้องPhotoRobotจับภาพและวิดีโอ
- แก้ไข - เนื้อหาภาพหลังกระบวนการ
- PUBLISH - สร้างภาพเอาต์พุตในหลายรูปแบบ "จัดการโปรไฟล์"
การติดตั้งแอปตัวควบคุมPhotoRobot
หากต้องการติดตั้งแอป PhotoRobot Controls บนคอมพิวเตอร์ของคุณ ให้ลงชื่อเข้าใช้บัญชี PhotoRobot ของคุณแล้วไปที่ PhotoRobot Downloads
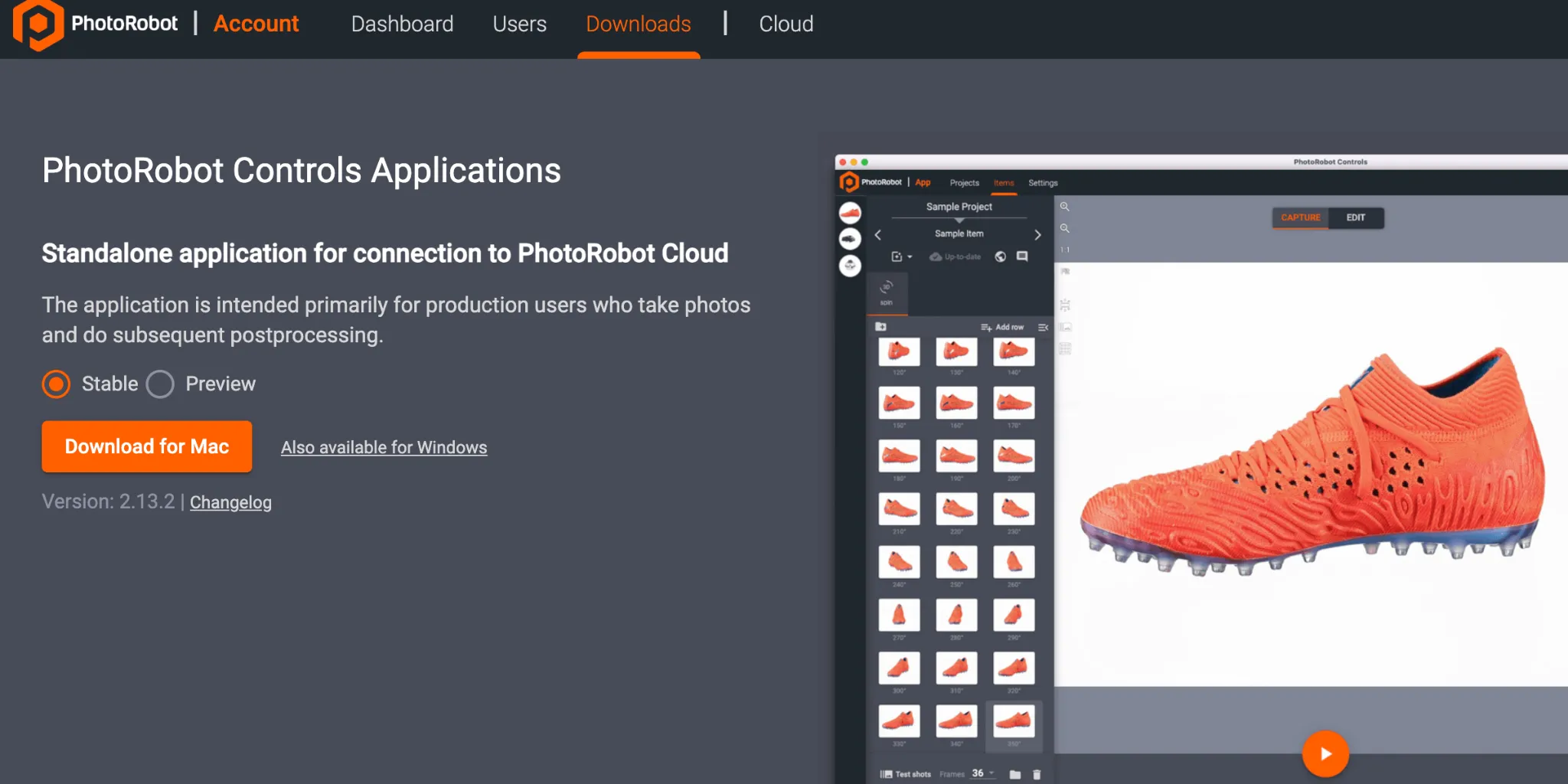
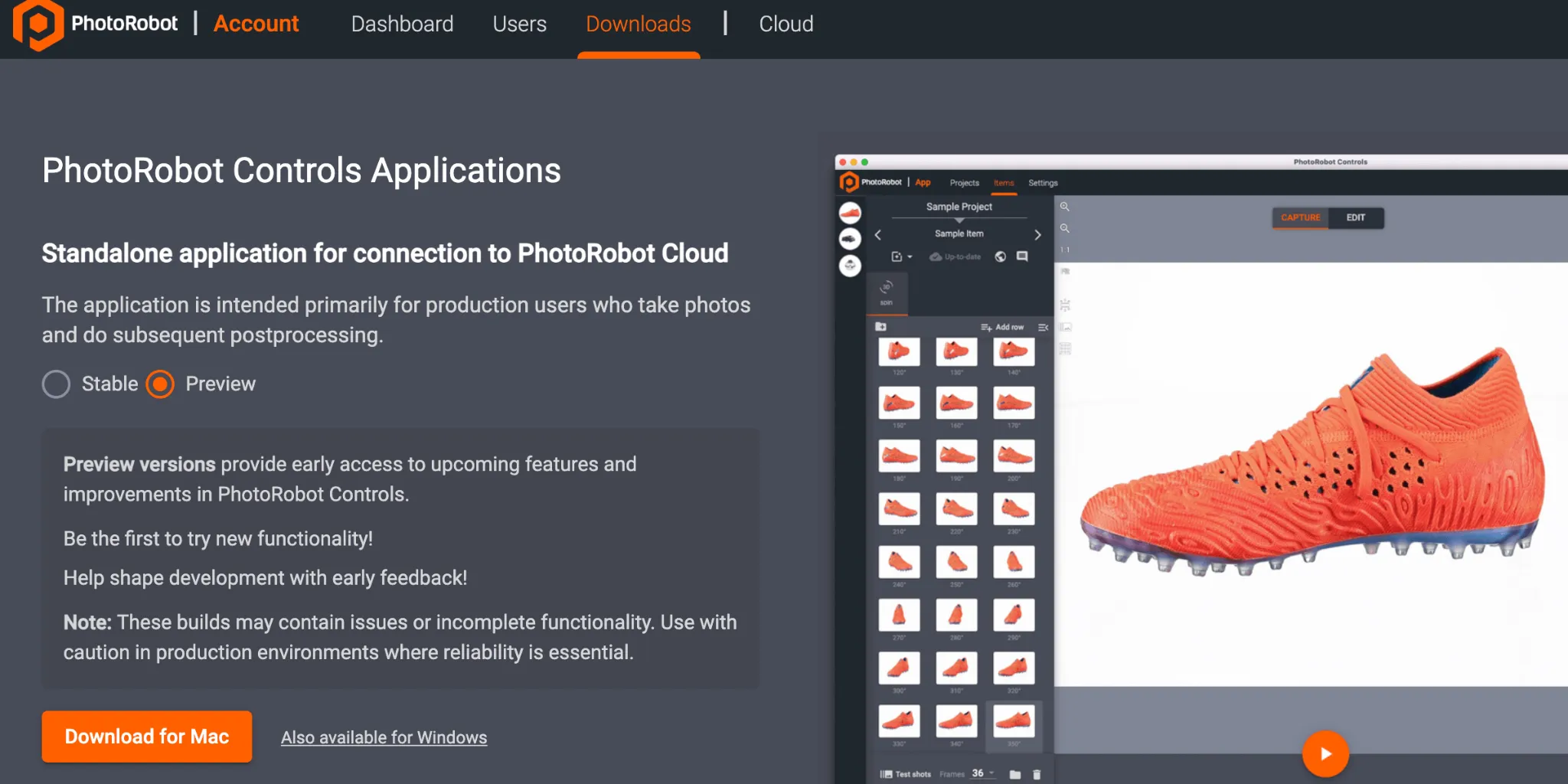
โน้ต: ทั้ง เวอร์ชันเสถียร และเวอร์ชัน ตัวอย่างของ CAPP พร้อมให้ดาวน์โหลดผ่านวิซาร์ดตัวติดตั้ง เวอร์ชันเสถียรประกอบด้วย CAPP เวอร์ชันล่าสุด และได้รับการเผยแพร่เวอร์ชันบ่อยครั้ง ในขณะเดียวกัน CAPP เวอร์ชันตัวอย่างให้การเข้าถึงคุณสมบัติและการแก้ไขล่าสุดก่อนใคร ซึ่งจะถ่ายโอนไปยังเวอร์ชันเสถียรภายในไม่กี่วันของการพัฒนา ซึ่งช่วยให้ผู้ใช้สามารถทดสอบปัญหาใดๆ ที่เกิดขึ้นในเวอร์ชันตัวอย่างก่อนที่จะติดต่อฝ่ายสนับสนุน เนื่องจากปัญหาที่รายงานส่วนใหญ่ในเวอร์ชันเสถียรได้รับการแก้ไขแล้วในเวอร์ชันตัวอย่าง อย่างไรก็ตาม โปรดทราบว่าไม่แนะนําให้ใช้เวอร์ชันตัวอย่างสําหรับการใช้งานจริงซึ่งความเสถียรเป็นปัจจัยสําคัญ เวอร์ชันตัวอย่างอยู่ระหว่างการพัฒนา ซึ่งอาจยังคงมีคุณสมบัติที่ไม่สมบูรณ์หรือข้อบกพร่องที่ยังไม่ได้รับการแก้ไข
สําคัญ: CAPP เวอร์ชันเก่าไม่ได้มีไว้สําหรับลูกค้าหรือการแจกจ่ายสาธารณะเนื่องจากความเสี่ยงของความเสียหายของฐานข้อมูล CAPP เวอร์ชันเก่าสามารถเข้าถึงได้เฉพาะช่างเทคนิค PhotoRobot ที่ได้รับอนุญาตสําหรับการพัฒนาภายใน หรือสําหรับกรณีการใช้งานพิเศษเท่านั้น
หากต้องการค้นหา CAPP เวอร์ชันเสถียรล่าสุดและเวอร์ชันพรีวิว โปรดดูที่ CAPP เวอร์ชันดาวน์โหลดล่าสุด
การสนับสนุนการติดตั้งด้วยตนเองและการแก้ไขปัญหา
กระบวนการติดตั้งเริ่มต้นด้วยการดาวน์โหลดไฟล์ตัวติดตั้ง
สังเกต ข้อกําหนดสําหรับการติดตั้ง CAPP:
- ผู้ใช้ต้องมีสิทธิ์การอนุญาตของผู้ดูแลระบบบนคอมพิวเตอร์ที่ติดตั้ง CAPP
- คอมพิวเตอร์ต้องเป็นไปตามข้อกําหนดของระบบ และฮาร์ดแวร์ของ PhotoRobot ทั้งหมด
- คอมพิวเตอร์ต้องใช้ระบบปฏิบัติการที่รองรับพร้อมการอัปเดตล่าสุด
สําคัญ: โปรดทราบว่า CAPP ไม่เพียง แต่ประกอบด้วยฟังก์ชันการควบคุมหุ่นยนต์เท่านั้น แต่ยังรวมถึงไดรเวอร์สําหรับกล้อง ไฟ และอุปกรณ์ต่อพ่วงอื่นๆ ด้วย ด้วยเหตุนี้ มักจะไม่รองรับ Mac OS เวอร์ชันล่าสุดในทันที อย่างไรก็ตาม หากสิ่งนี้เกิดขึ้น จะเป็นเพียงชั่วคราวเท่านั้น และจนกว่าผู้ขายที่เกี่ยวข้องทั้งหมดจะปล่อยไลบรารีที่ เข้ากันได้
แม้ว่าสิ่งนี้อาจไม่สะดวก แต่ก็ไม่สะดวกน้อยกว่าปัญหาความเข้ากันได้เมื่อใช้ CAPP การดาวน์เกรดยังซับซ้อนกว่าการหลีกเลี่ยงการอัปเกรดก่อนเวลาอันควร
หลังจากตรงตามข้อกําหนดของระบบปฏิบัติการและระบบแล้ว การติดตั้งจะดําเนินการต่อผ่านวิซาร์ดตัวติดตั้ง ลงชื่อเข้าใช้บัญชี PhotoRobot จากนั้นดําเนินการตั้งค่าโดยทําตามขั้นตอนด้านล่าง
ตั้ง ค่า
การยืนยันความยินยอมของผู้ใช้
เมื่อดาวน์โหลด CAPP การเปิดใช้งานบัญชีผู้ใช้ใหม่จําเป็นต้องมีการยืนยันจากผู้ใช้เกี่ยวกับข้อตกลงสิทธิ์การใช้งานสําหรับผู้ใช้ปลายทาง (EULA) และเอกสารอื่นๆ ที่เกี่ยวข้อง
หลังจากเปิดใช้งานบัญชีแล้ว คุณสามารถตรวจสอบข้อมูลความยินยอมที่คุณส่งผ่าน CAPP เวอร์ชันคลาวด์ในการตั้งค่าโปรไฟล์บัญชี
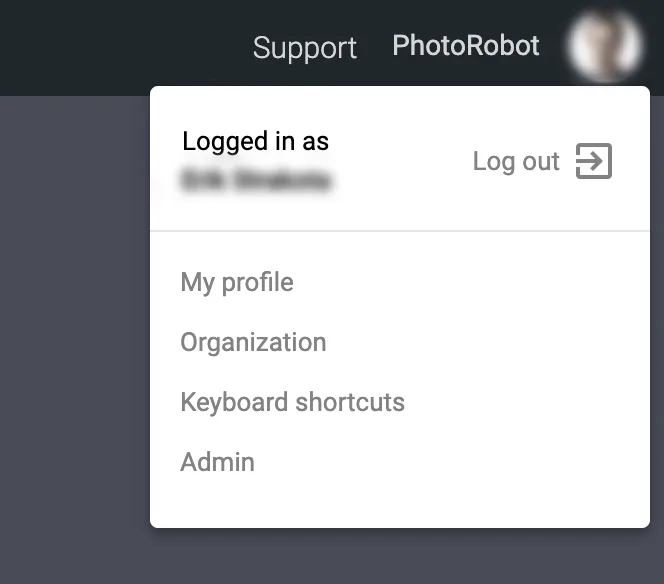
หากต้องการตรวจสอบข้อมูลความยินยอมของคุณ ให้เปิด CAPP เวอร์ชันคลาวด์ แล้วคลิกที่ไอคอนบัญชีผู้ใช้ที่มุมบนขวาของอินเทอร์เฟซ จากนั้นเลือก โปรไฟล์ของฉัน จากตัวเลือกเมนู

เมนูโปรไฟล์จะแสดงรูปโปรไฟล์ ข้อมูลผู้ใช้ทั่วไป (ชื่อ โทรศัพท์ บริษัท) การตั้งค่ารหัสผ่าน และข้อมูลความยินยอม ข้อมูลความยินยอมประกอบด้วย:
- ชื่อโฮสต์ของคอมพิวเตอร์
- ตกลงกันในวัน
- ข้อตกลงสิทธิ์การใช้งานโปรแกรมระหว่างประเทศของ PhotoRobot
- ความยินยอมในการประมวลผลข้อมูลส่วนบุคคล
- ข้อมูลเกี่ยวกับการประมวลผลข้อมูลส่วนบุคคล
กล้องที่รองรับ
สําคัญ: เพื่อให้แน่ใจว่า CAPP สื่อสารกับกล้องอย่างถูกต้อง โปรดปิดโปรแกรมอื่นๆ ทั้งหมดที่เชื่อมต่อกับกล้อง นอกจากนี้ ต้องแน่ใจว่าได้ใช้กล้องที่เข้ากันได้จากรายการรุ่นกล้อง ที่รองรับ PhotoRobot
หมายเหตุ: ณ วันที่เปิดตัว PhotoRobot Controls App 2.5.4 กล้องทุกรุ่นสามารถรองรับได้ผ่านการรวมกล้องของบุคคลที่สาม อย่างไรก็ตาม สำหรับการถ่ายภาพอัตโนมัติ กล้อง Canon แบบมิเรอร์เลสรุ่นล่าสุดมีความน่าเชื่อถือและมีประสิทธิภาพมากที่สุด
แม้ว่าจะเป็นไปได้ที่จะใช้กล้องมือถือที่แนะนําโดย PhotoRobot ผ่าน Wi-Fi หรือการเชื่อมต่อสายเคเบิล แต่การทําเช่นนั้นอาจสร้างปัญหาได้
- อาจมีการตัดการเชื่อมต่อ Wi-Fi บ่อยครั้ง (ส่วนใหญ่เกิดจากการหมดเวลา) สิ่งเหล่านี้ต้องการการเชื่อมต่อใหม่กับระบบ ที่ใช้เวลานาน
- หากใช้กล้องมือถือผ่านการเชื่อมต่อสายเคเบิล จะมีความยุ่งยากของความยาวสายเคเบิล และความเสี่ยงต่อการเชื่อมต่อ
สำหรับการเชื่อมต่อ iPhone ผ่านแอป PhotoRobot Touch โปรดทราบว่าปัญหาเหล่านี้จะไม่เกิดขึ้น iPhone จะสามารถถ่ายภาพแบบถือด้วยมือได้ในการตั้งค่าที่ใช้แสงต่อเนื่อง อย่างไรก็ตาม หากจำเป็นต้องใช้การถ่ายภาพด้วยแฟลช กล้องมือถือที่เข้ากันได้สามารถใช้เป็นทางเลือกแทนกล้องมิเรอร์เลสที่แนะนำได้ เพียงแค่จำไว้ว่าปัญหาที่อาจเกิดขึ้นกับ Wi-Fi และรุ่นมือถือแบบมีสาย
ไฟที่รองรับ
เพื่อให้ CAPP สื่อสารกับระบบไฟส่องสว่างได้ โปรดใช้ ไฟสตูดิโอที่เข้ากันได้กับ PhotoRobot ซึ่งรวมถึงไฟสองประเภท: ไฟแฟลชจาก FOMEI และ Broncolor และไฟ LED ทุกประเภทที่รองรับ DMX
การตั้งค่าการสนับสนุนระยะไกล
หลังจากติดตั้ง PhotoRobot Controls ทันที ขอแนะนำให้ผู้ใช้ ดาวน์โหลดและติดตั้งแอป Splashtop SOS (ภูมิภาค EU) Splashtop SOS (EU) ช่วยให้ช่างเทคนิค PhotoRobot สามารถเข้าถึงคอมพิวเตอร์ของลูกค้าและให้ความช่วยเหลือทางเทคนิคหลังจากที่ผู้ใช้อนุญาตสำหรับกรณีเฉพาะ
การดาวน์โหลด Splashtop SOS พร้อมกับ PhotoRobot Controls จะช่วยหลีกเลี่ยงความล่าช้าสำหรับคำขอการสนับสนุนทางเทคนิคจากระยะไกล ตัวอย่างเช่น เมื่อผู้ใช้ไม่มีสิทธิ์เพียงพอในการติดตั้งแอปพลิเคชัน หลังจากติดตั้ง Splashtop ช่างเทคนิคของเราจะสามารถใช้ Splashtop Business เพื่อเข้าถึงคอมพิวเตอร์ที่มีคำขอการสนับสนุนทางเทคนิคได้ทันที
อย่างไรก็ตาม โปรดทราบว่าผู้ใช้ ต้องดาวน์โหลดเวอร์ชันสำหรับภูมิภาค EU ของแอป Splashtop SOS แอปเวอร์ชันสำหรับภูมิภาค US ไม่อนุญาตให้ช่างเทคนิคของเราเข้าถึงคอมพิวเตอร์ของคุณ
ดังนั้น โปรด ตรวจสอบให้แน่ใจว่าคุณใช้ลิงก์ภูมิภาค EU ต่อไปนี้เพื่อดาวน์โหลด Splashtop SOS:
หมายเหตุ: สำหรับข้อมูลเพิ่มเติมเกี่ยวกับการตั้งค่าการสนับสนุนระยะไกลสำหรับระบบ PhotoRobot โปรดดูที่ การตั้งค่าการสนับสนุนระยะไกลของ PhotoRobot
การสร้างพื้นที่ทํางาน
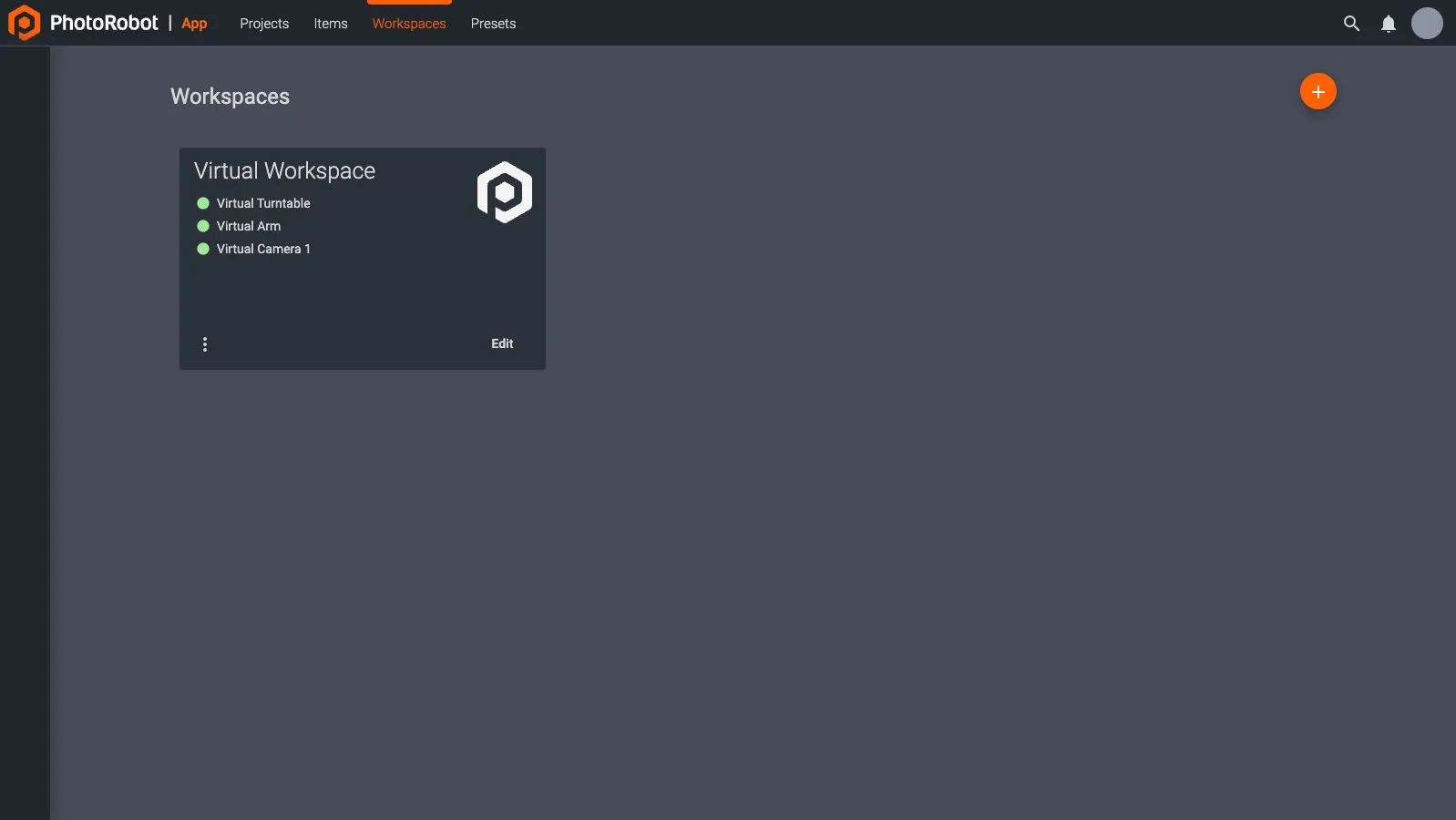
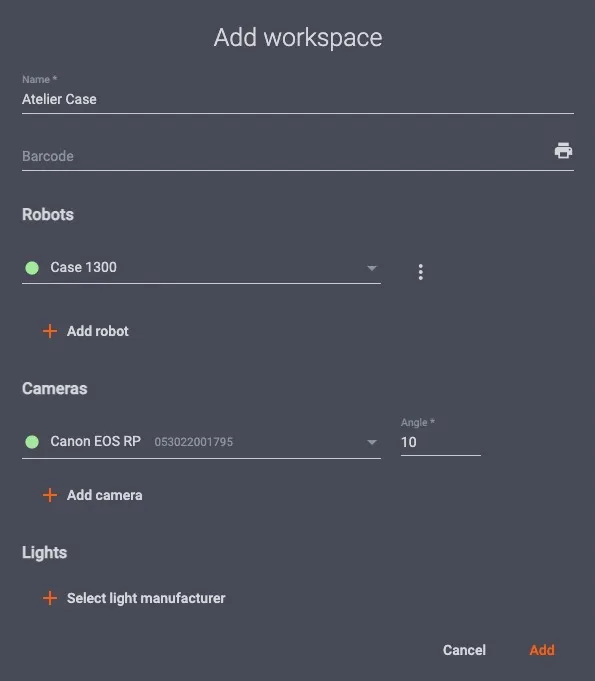
หลังจากเปิด CAPP โดยทั่วไปสิ่งแรกที่ผู้ใช้ทําคือสร้างพื้นที่ทํางาน พื้นที่ทํางานคือรายการของฮาร์ดแวร์ที่ใช้สําหรับการถ่ายภาพเฉพาะ มันสามารถรวมถึงโมดูลPhotoRobotต่างๆกล้องไฟและอุปกรณ์เสริม อื่น ๆ
เพื่อวัตถุประสงค์ในการสาธิต ผู้ใช้สามารถทํางานกับ Sample Workspace ที่กําหนดไว้ล่วงหน้า ซึ่งถูกกําหนดค่าให้ใช้ฮาร์ดแวร์เสมือนได้ ด้วยวิธีนี้ผู้ใช้ยังสามารถทดลองกับคุณสมบัติต่าง ๆ ของ CAPP โดยเลือกหุ่นยนต์และกล้องเสมือน
การเชื่อมต่อฮาร์ดแวร์
ในการเริ่มใช้ฮาร์ดแวร์จริง (ตรงข้ามกับฮาร์ดแวร์เสมือน) ก่อนอื่นตรวจสอบให้แน่ใจว่าฮาร์ดแวร์เชื่อมต่อกับเครือข่ายคอมพิวเตอร์เดียวกัน (หรือเครือข่ายย่อย) กับคอมพิวเตอร์ที่คุณใช้ควบคุม PhotoRobot ของคุณ
หมายเหตุ: ณ PhotoRobot Controls เวอร์ชัน 2.5.4, กล้องทุกรุ่น สามารถรองรับได้ผ่าน การรวมกล้องของบุคคลที่สาม. ในขณะเดียวกัน กล้องที่เข้ากันได้รวมถึงกล้อง Canon หลายรุ่น, กล้อง Canon ที่รองรับ Wi-Fi ที่แนะนำของเรา, และกล้อง iPhone หากใช้ PhotoRobot Touch App.
สำคัญ: สำหรับการถ่ายภาพอัตโนมัติด้วยเวิร์กสเตชัน ROBOTIC รุ่นกล้องมิเรอร์เลส Canon ที่ PhotoRobot แนะนำนั้นเชื่อถือได้มากที่สุด แม้จะมีการรองรับกล้องมือถือผ่าน Wi-Fi หรือการเชื่อมต่อสายเคเบิล แต่การใช้งานอาจก่อให้เกิดปัญหาได้ ซึ่งรวมถึงการตัดการเชื่อมต่อ Wi-Fi บ่อยครั้ง (ส่วนใหญ่เกิดจากการหมดเวลา), ความยุ่งยากเกี่ยวกับความยาวสายเคเบิล และความเสี่ยงต่อการเชื่อมต่อ
ในการเชื่อมต่อกล้อง จะต้องเชื่อมต่อกับเครือข่ายคอมพิวเตอร์ท้องถิ่นเดียวกันกับหุ่นยนต์ด้วยวิธีใดวิธีหนึ่งจากสามวิธี:
- การเชื่อมต่อโดยตรง ผ่าน USB ไปยังเครือข่ายท้องถิ่น
- การเชื่อมต่อกล้องมือถือที่แนะนํา ผ่านโปรโตคอล Wi-Fi พิเศษ (เข้าถึงได้ในแอปพลิเคชัน Tool ของ Canon ในหน้า นักพัฒนา Canon)
- การรวม iPhone หนึ่งเครื่องหรือหลายเครื่องผ่านแอปพลิเคชัน PhotoRobot Touch (สําหรับคําแนะนําในการใช้ iPhone กับ PhotoRobot โปรดดูคู่มือผู้ใช้แอป iPhone Touch)
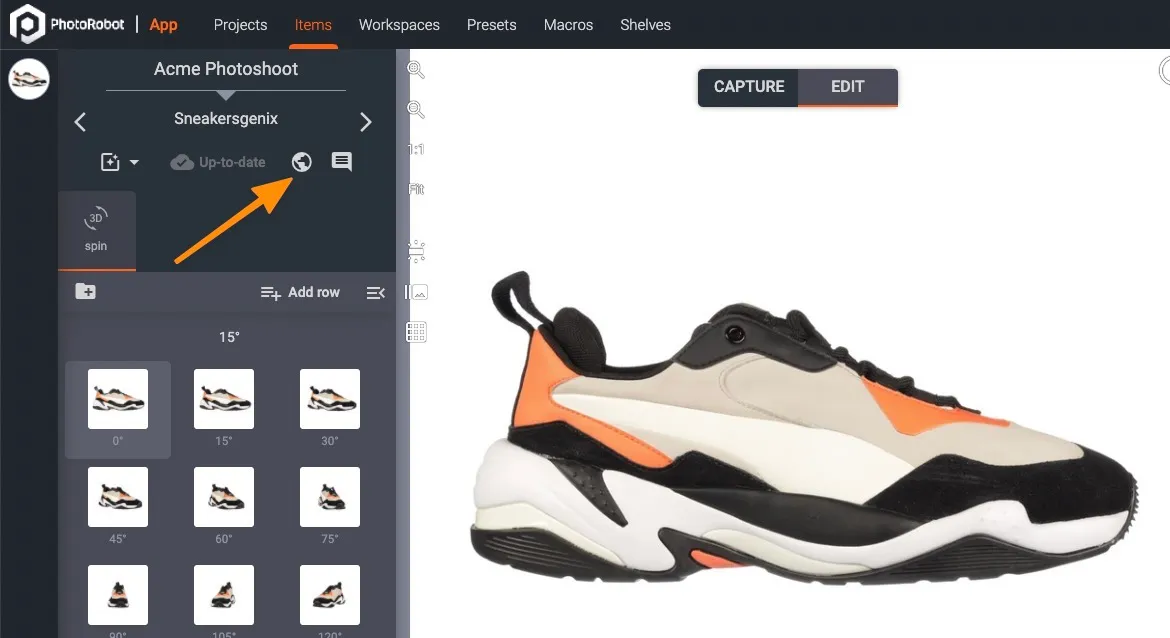
หลังจากเชื่อมต่อฮาร์ดแวร์ (หรือกล้อง) เข้ากับพื้นที่ทำงานแล้ว คุณสามารถตรวจสอบได้ว่าอุปกรณ์นั้นออนไลน์อยู่หรือไม่ (CAPP รู้จักหรือไม่) ในการดำเนินการนี้ ให้ตรวจสอบจุดทางด้านซ้ายของชื่ออุปกรณ์นั้นๆ หากอุปกรณ์ได้รับการรู้จัก จะมี จุดสีเขียว
จุดสีเทา ถัดจากชื่ออุปกรณ์บ่งชี้ว่าฮาร์ดแวร์ไม่ได้รับการจดจำหรือไม่เปิดใช้งาน หากมี จุดสีแดง แสดงว่ามีข้อผิดพลาด เช่น ผู้ใช้ไม่ได้เปลี่ยนกล้องเป็นโหมดแมนนวล เป็นต้น หากต้องการระบุสาเหตุของข้อผิดพลาด ให้เลื่อนเมาส์ไปเหนือจุดสีแดงเพื่อแสดงคำแนะนำเครื่องมือพร้อมคำอธิบายข้อผิดพลาดที่เกิดขึ้น
สำหรับคำแนะนำทีละขั้นตอนเกี่ยวกับการเชื่อมต่อฮาร์ดแวร์เพื่อตั้งค่าพื้นที่ทำงาน โปรดดูที่ การตั้งค่าพื้นที่ทำงาน PhotoRobot
หากพบปัญหา โปรดดู การแก้ไขปัญหา PhotoRobot สำหรับปัญหาทั่วไปและวิธีแก้ไข
การตั้งค่าความสูงของแขนหุ่นยนต์
หากใช้แขนหุ่นยนต์ในพื้นที่ทํางาน โปรดทราบว่าอาจมีการตั้งค่าเพิ่มเติม เนื่องจากแขนหุ่นยนต์เป็นเครื่องจักรอิสระ และหนึ่งในหน้าที่ของการควบคุมผ่าน CAPP คือการเคลื่อนที่ระดับความสูงของแกนหมุนให้ตรงกับจุดกึ่งกลางของความสูง ของวัตถุที่ถ่ายภาพ
ความสูงของแกนหมุนของแขนหุ่นยนต์ถูกกําหนดโดยประเภทเครื่องเวิร์กสเตชัน และในขณะเดียวกันก็โดยการปรับขาปรับระดับ ซึ่งชดเชยความไม่สม่ําเสมอของพื้น หากทุกอย่างได้รับการตั้งค่าอย่างถูกต้องเครื่องจะอยู่ในระดับและศูนย์การหมุนจะอยู่ที่ความสูงเฉพาะเหนือพื้น อย่างไรก็ตาม ความสูงทั้งหมดจะขึ้นอยู่กับความสูงของพื้นผิวเครื่องเล่นแผ่นเสียง ซึ่งแตกต่างกันไปตามหุ่นยนต์ที่แตกต่างกัน ซึ่งหมายความว่าอาจมีความคลาดเคลื่อนในการอ้างอิงความสูง เนื่องจากมีอะแดปเตอร์ความสูงอยู่ใต้คอลัมน์ของแขนหุ่นยนต์เพื่อให้อยู่ในแนวเดียวกันโดยประมาณ
เพื่อให้แน่ใจว่ามีการจัดตําแหน่งที่สมบูรณ์แบบ จําเป็นต้องป้อนความแตกต่างของความสูงระหว่างแขนและเครื่องเล่นแผ่นเสียงลงใน CAPP ความแตกต่างของความสูงจะวัดระยะห่างที่แน่นอนระหว่างแกนหมุนของแขนหุ่นยนต์กับความสูงที่พื้นผิวเครื่องเล่นแผ่นเสียงอยู่ในตําแหน่ง (รวมถึงกระดานเพิ่มเติมที่วางอยู่ด้านบน) สิ่งนี้ให้ขนาดที่แน่นอนซึ่งระบบคํานวณครึ่งหนึ่งของความสูงของวัตถุ และตําแหน่งที่แขนควรเคลื่อนที่ นอกจากนี้ยังช่วยให้มั่นใจได้ว่าระบบได้รับการตั้งค่าให้ทํางานโดยอัตโนมัติและถูกต้อง
หมายเหตุ: ระบบถูกตั้งค่าให้ปฏิเสธค่าที่อยู่นอกช่วงที่ถูกต้องสําหรับการตั้งค่าที่กําหนด
ตั้งค่าลิฟต์แขน ROBOTIC ไปที่ระดับศูนย์
ในการตั้งค่าลิฟต์แขนหุ่นยนต์ให้เป็นระดับศูนย์ ก่อนอื่นให้เปิด CAPP เวอร์ชันท้องถิ่น และเข้าถึง การตั้งค่าพื้นที่ทำงาน ได้สองวิธี:
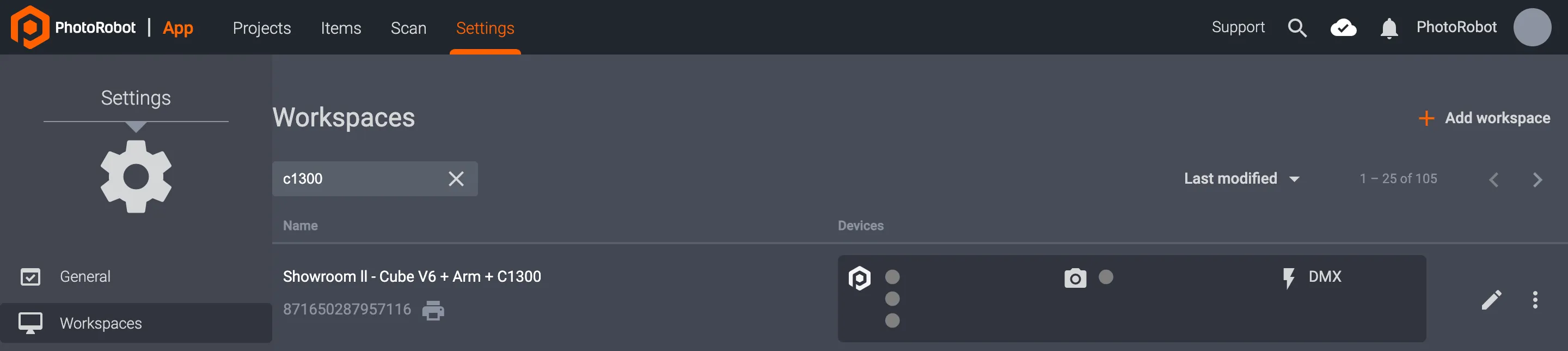
1. เปิด CAPP เวอร์ชันในเครื่อง คลิก การตั้งค่า ที่ด้านบนของอินเทอร์เฟซ แล้วเลือก พื้นที่ทํางาน จากตัวเลือกเมนูด้านซ้ายมือ ใน เมนูนี้ ให้ค้นหาพื้นที่ทํางานที่กําลังทํางาน แล้วคลิกไอคอนแก้ไขถัดจากชื่อพื้นที่ทํางานเพื่อเปิด แก้ไขการตั้งค่าพื้นที่ทํางาน:
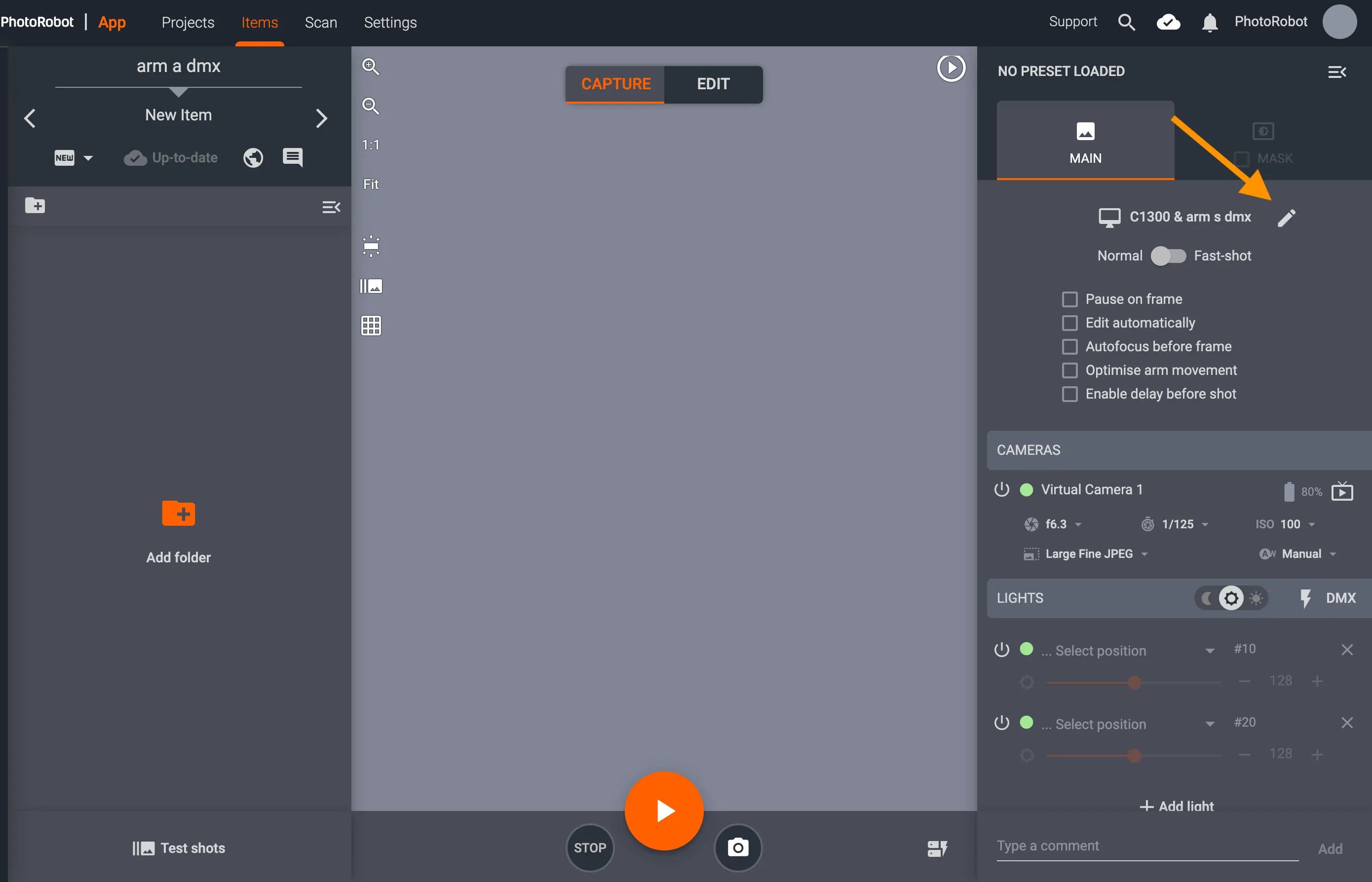
2. หรือเป็นไปได้ที่จะเข้าถึงเมนูแก้ไขพื้นที่ทํางานโดยเปิด รายการในโหมด จับภาพใน CAPP เวอร์ชันในเครื่องจากนั้นคลิกไอคอนแก้ไข ถัดจากชื่อพื้นที่ทํางาน ทางด้านขวาของอินเทอร์เฟซ:
วิธีใดวิธีหนึ่งจะเปิดการตั้งค่า แก้ไขพื้นที่ทํางาน จากนั้น ในการกําหนดค่า Robot Arm ให้ค้นหาอุปกรณ์ภายใต้เมนู หุ่นยนต์ แล้วคลิกจุดแนวตั้ง 3 จุดถัดจากชื่อ Robot Arm
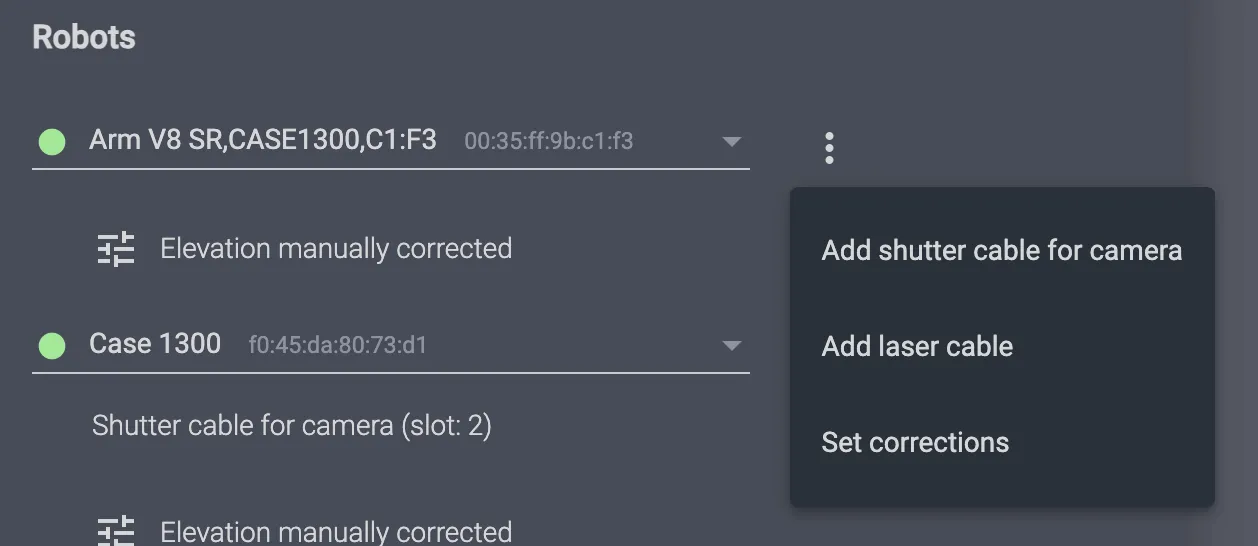
จากนั้นเลือกตัวเลือกเมนู ตั้งค่าการแก้ไขเพื่อ เปิดฟังก์ชัน ตั้งค่าการแก้ไขลิฟต์ :
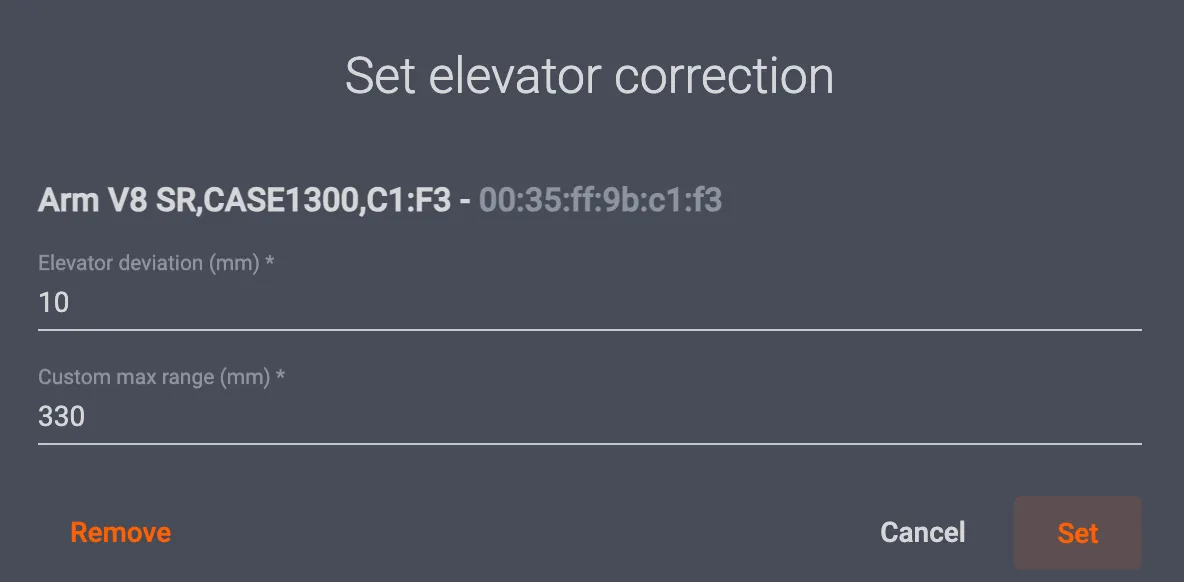
ในเมนูตั้งค่าการแก้ไขลิฟต์ ให้ปรับตัวเลขในช่องด้านบน ส่วนเบี่ยงเบนของลิฟต์ (มม.) เพื่อตั้งค่าระดับความสูงของกล้องเป็นระดับศูนย์ที่เหมาะสม สําหรับอดีต amp หากกล้องอยู่นอกกึ่งกลางเหนือโต๊ะ 10 มม. ให้ตั้งค่าความเบี่ยงเบนของลิฟต์เป็น -10 มม. เพื่อจัดกล้องให้อยู่ตรงกลาง
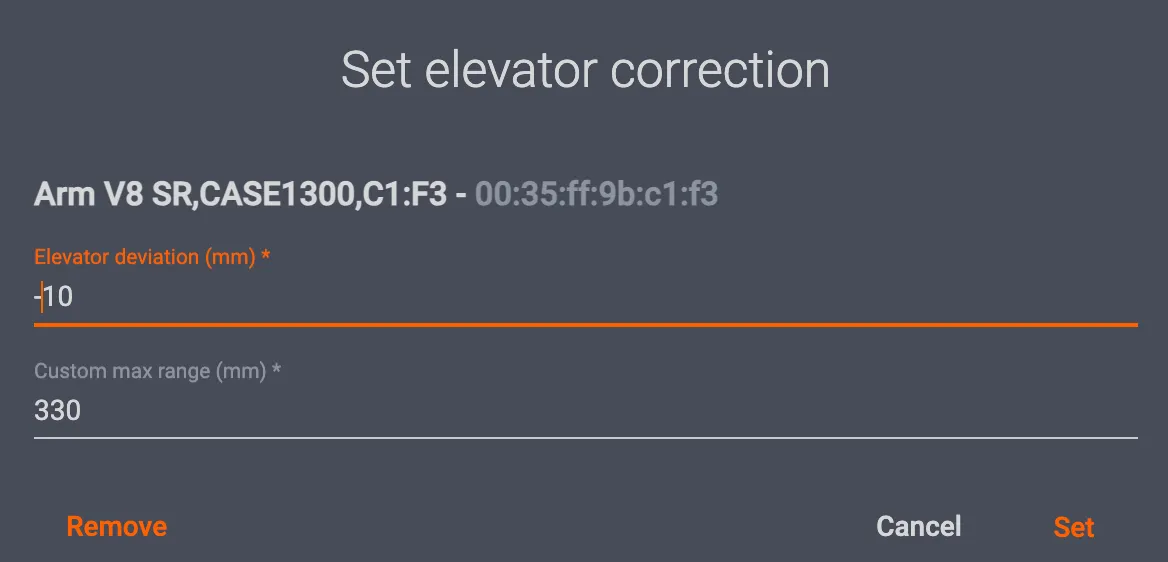
หากกล้องอยู่นอกกึ่งกลางใต้โต๊ะ 10 มม. ให้ตั้งค่าความเบี่ยงเบนของลิฟต์เป็น +10 มม. การดําเนินการนี้จะจัดตําแหน่งระดับความสูงของกล้องที่ติดตั้งบนแขนหุ่นยนต์ให้ตรงกับระดับศูนย์ที่เหมาะสมในซอฟต์แวร์ อย่างถูกต้อง
โน้ต: ลิฟต์สามารถเข้าถึงได้สูงสุด 330 มม. ดังนั้นหากปรับระดับศูนย์ +30 มม. แรงยกสูงสุดจะสูงถึง 300 มม. เท่านั้น ซึ่งหมายความว่าระบบจะสามารถจับผลิตภัณฑ์ที่มีขนาดเล็กกว่าตามระยะขอบนี้ 30 มม. หรือน้อยกว่าเท่านั้น
การจัดการแฟ้ม - โครงการ รายการ และโฟลเดอร์
ใน CAPP รูปภาพจะถูกจัดระเบียบเป็นโครงการ รายการ และโฟลเดอร์
- โครงการคือเอนทิตีข้อมูลระดับสูงสุด โดยทั่วไปโครงการจะรวมรายการจากการถ่ายภาพเดียวหรืออาจเป็นวันถ่ายภาพเดียว / สัปดาห์
- โครงการประกอบด้วย สินค้าหนึ่งรายการขึ้นไป โดยทั่วไปรายการเดียวจะเป็นวัตถุเฉพาะที่ถ่ายภาพ
- รายการมี โฟลเดอร์อย่างน้อยหนึ่งโฟลเดอร์ ใน CAPP คุณสามารถมีโฟลเดอร์หลายโฟลเดอร์ในรายการเดียวเพื่อแยกรูปภาพชนิดต่างๆ ออกจากกันได้ ตัวอย่างที่พบบ่อยมากคือการมีโฟลเดอร์หนึ่งสําหรับงานนําเสนอหมุน 360 ° (เรียกว่า "หมุน") ในขณะที่ใช้อีกโฟลเดอร์หนึ่งเพื่อเก็บภาพนิ่ง ("ภาพนิ่ง")
ในการเริ่มถ่ายภาพ คุณต้องเพิ่มโปรเจ็กต์ใหม่ก่อน (เว้นแต่คุณจะมีโปรเจ็กต์ที่คุณต้องการใช้อยู่แล้ว) รวมถึงอย่างน้อยหนึ่งรายการ
( ! ) - หากประสบปัญหา ให้ค้นหาการสนับสนุนเพิ่มเติมสําหรับการเชื่อมต่อกล้อง หุ่นยนต์ ไฟ และการแก้ไขในคู่มือการแก้ไขปัญหาปี PhotoRobot
การตั้งค่าทั่วไป - Cloud Auto Backup, Processing, Touch App
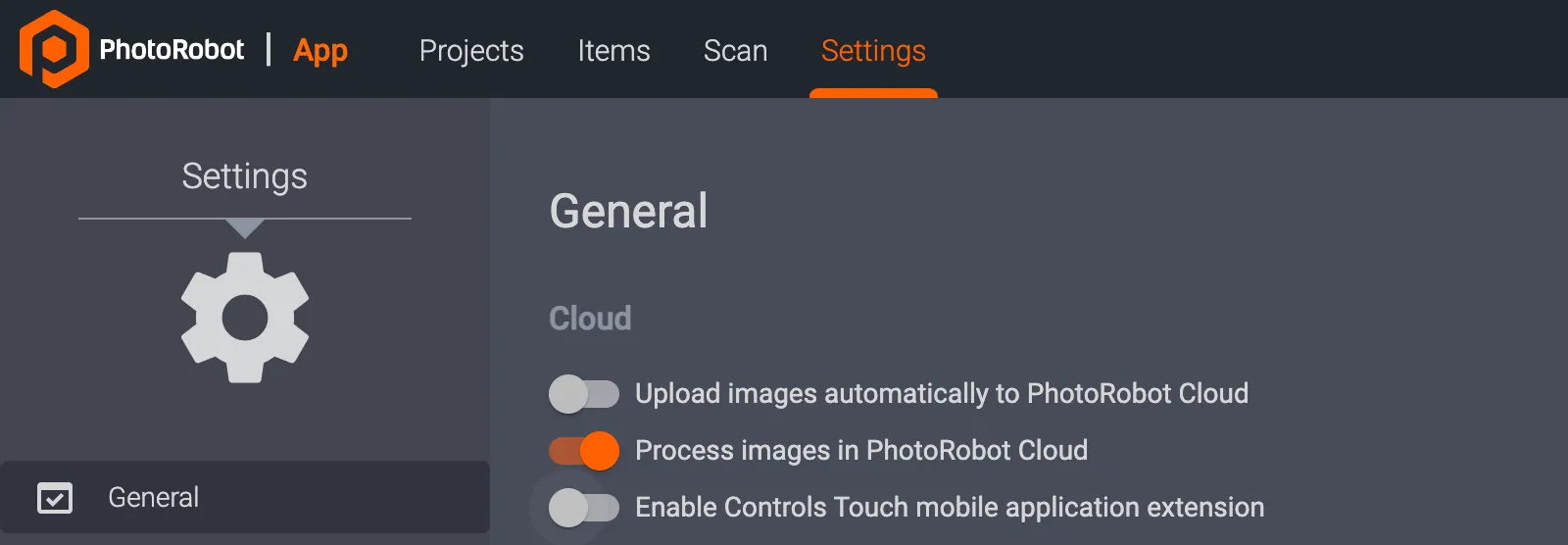
ใน CAPP เวอร์ชันเดสก์ท็อปในเครื่อง มีการตั้งค่าทั่วไป 3 แบบเพื่อเปิดหรือปิด:
- อัปโหลดภาพไปยัง PhotoRobot Cloud โดยอัตโนมัติ
- ประมวลผลภาพใน PhotoRobot Cloud
- เปิดใช้งานการควบคุมส่วนขยายแอปพลิเคชันมือถือแบบสัมผัส
โดยค่าเริ่มต้น แอปในเครื่องจะถูกตั้งค่าเป็นอัปโหลดรูปภาพไปยัง PhotoRobot Cloud โดยอัตโนมัติ คุณลักษณะนี้จะบันทึกข้อมูลสํารองของภาพที่ถ่ายไปยังเซิร์ฟเวอร์คลาวด์ของคุณโดยอัตโนมัติเพื่อส่งออกในภายหลัง
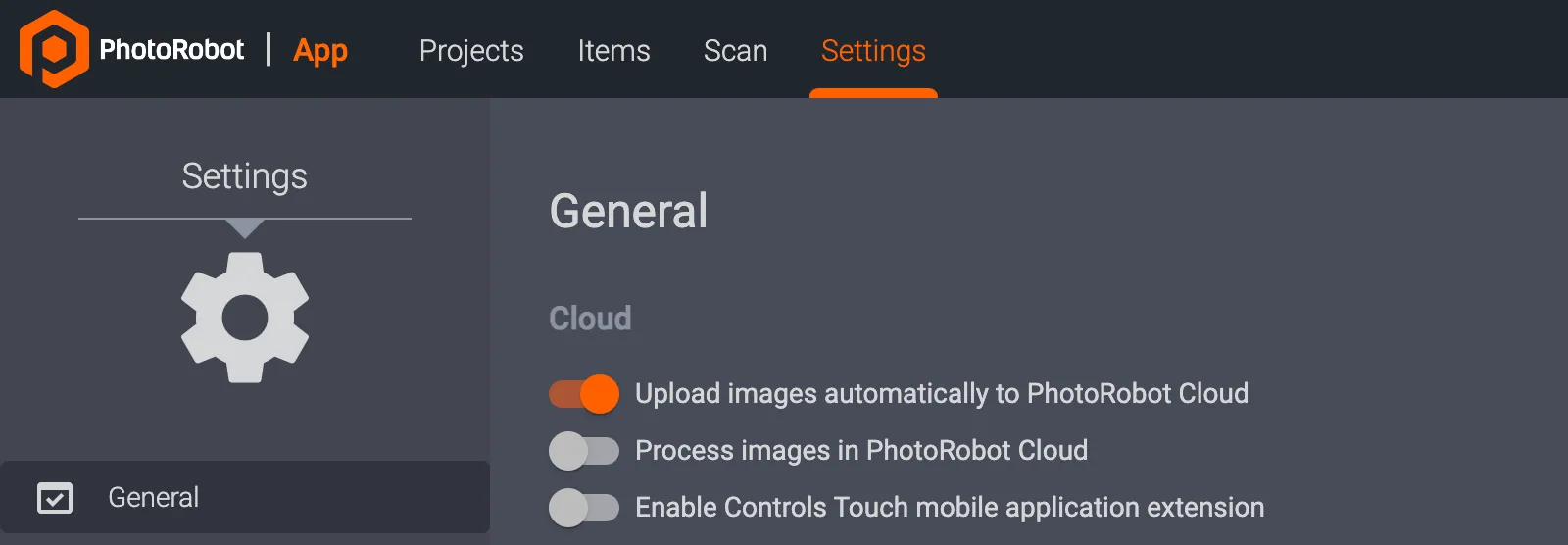
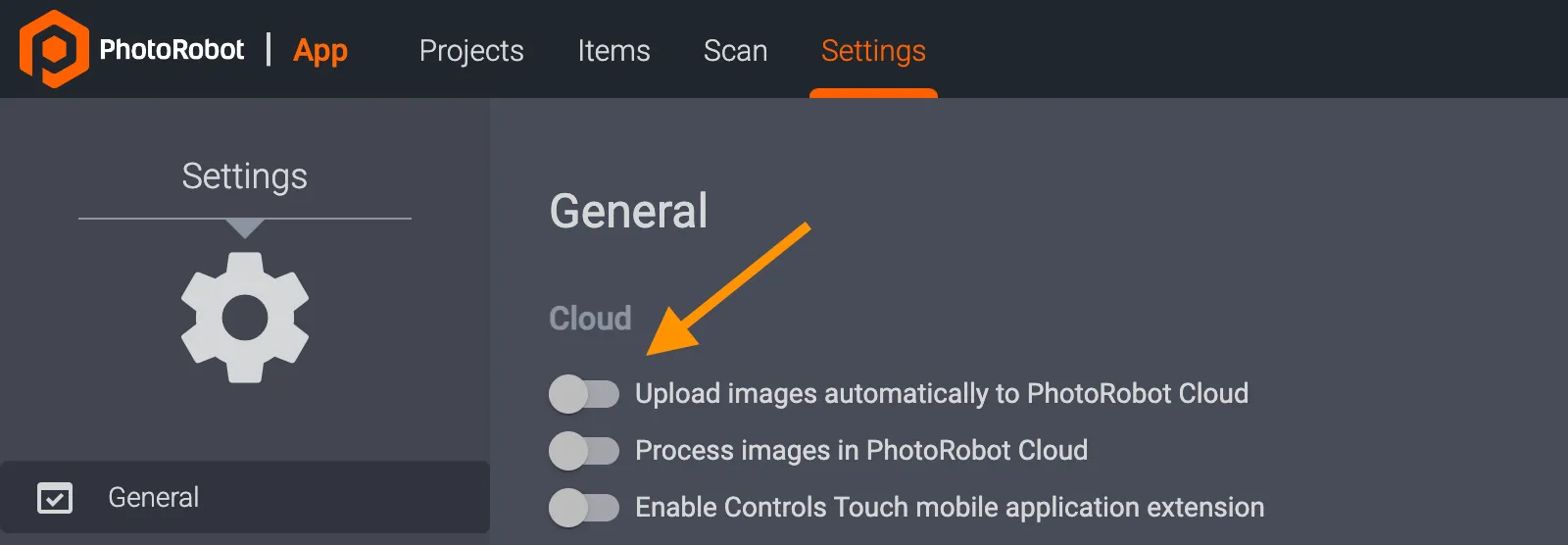
หากต้องการปิดใช้งานอัปโหลดรูปภาพไปยัง PhotoRobot Cloud โดยอัตโนมัติ ให้ปิดตัวเลือกในการตั้งค่าทั่วไปของ CAPP เวอร์ชันท้องถิ่น การดําเนินการนี้จะบันทึกรายการที่บันทึกไปยังแอปในเครื่องของคุณหรือบัญชีคลาวด์ของคุณเองแทน
ใช้การสลับเพื่อเปิดหรือปิดใช้งานคุณสมบัติประมวลผลภาพใน PhotoRobot Cloud เมื่อเปิด คุณสมบัตินี้จะประมวลผลภาพโดยอัตโนมัติตามค่าที่ตั้งไว้ล่วงหน้าใน PhotoRobot Cloud หลังจากการจับภาพ
หากใช้แอปพลิเคชันมือถือ PhotoRobot Touch สําหรับ iPhone ให้สลับเปิดเปิดใช้งานส่วนขยายแอปพลิเคชันมือถือแบบสัมผัสการควบคุม
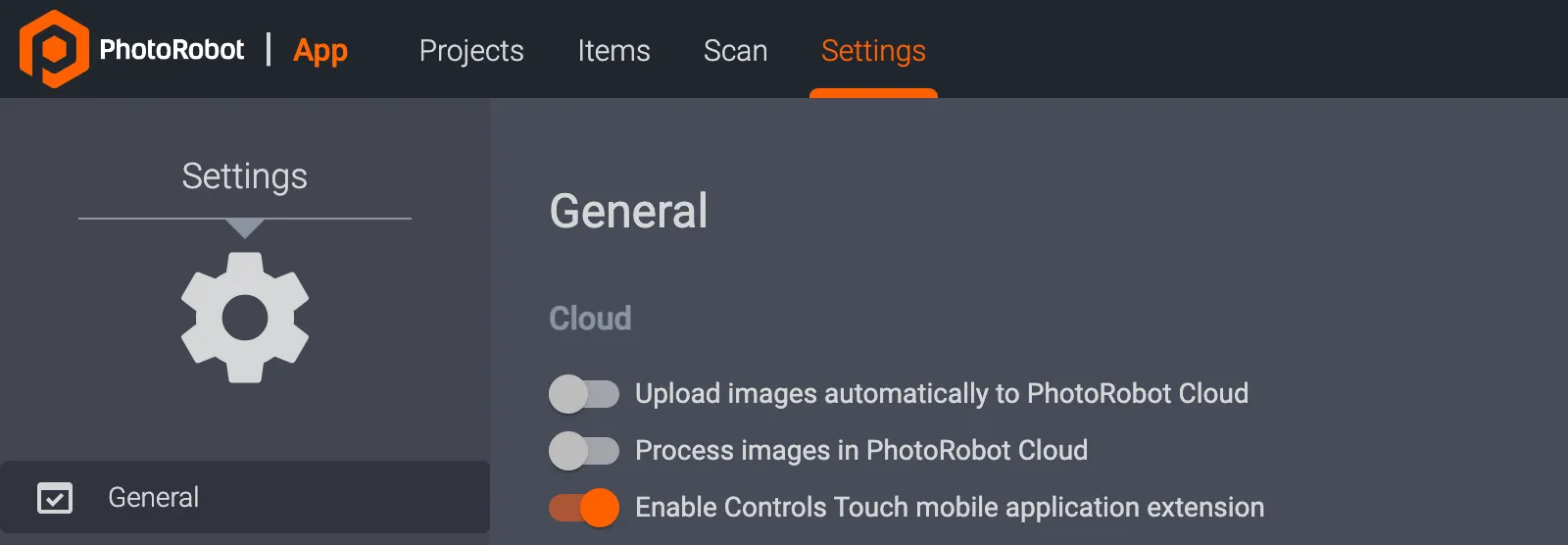
โน้ต: สําหรับคําแนะนําทางเทคนิคเกี่ยวกับการติดตั้งและการใช้งาน PhotoRobot Touch โปรดดูคู่มือผู้ใช้แอพ PhotoRobot iPhone Touch
การตั้งค่าทั่วไป - สร้างรายการใหม่โดยอัตโนมัติ
นอกจากนี้ ในการตั้งค่าทั่วไปใน CAPP เวอร์ชันเดสก์ท็อปภายในเครื่อง จะมีการตั้งค่าเครื่อง สแกนบาร์โค้ด ซึ่งเปิดใช้งานการกําหนดค่าตัวเลือกขั้นสูงสําหรับเครื่องอ่านบาร์โค้ด ใช้ปุ่มสลับทางด้านซ้ายของ สร้างรายการใหม่โดยอัตโนมัติในระบบเมื่อสแกนบาร์โค้ดที่ไม่รู้จัก เพื่อเปิดหรือปิดใช้งานการสร้างรายการอัตโนมัติ
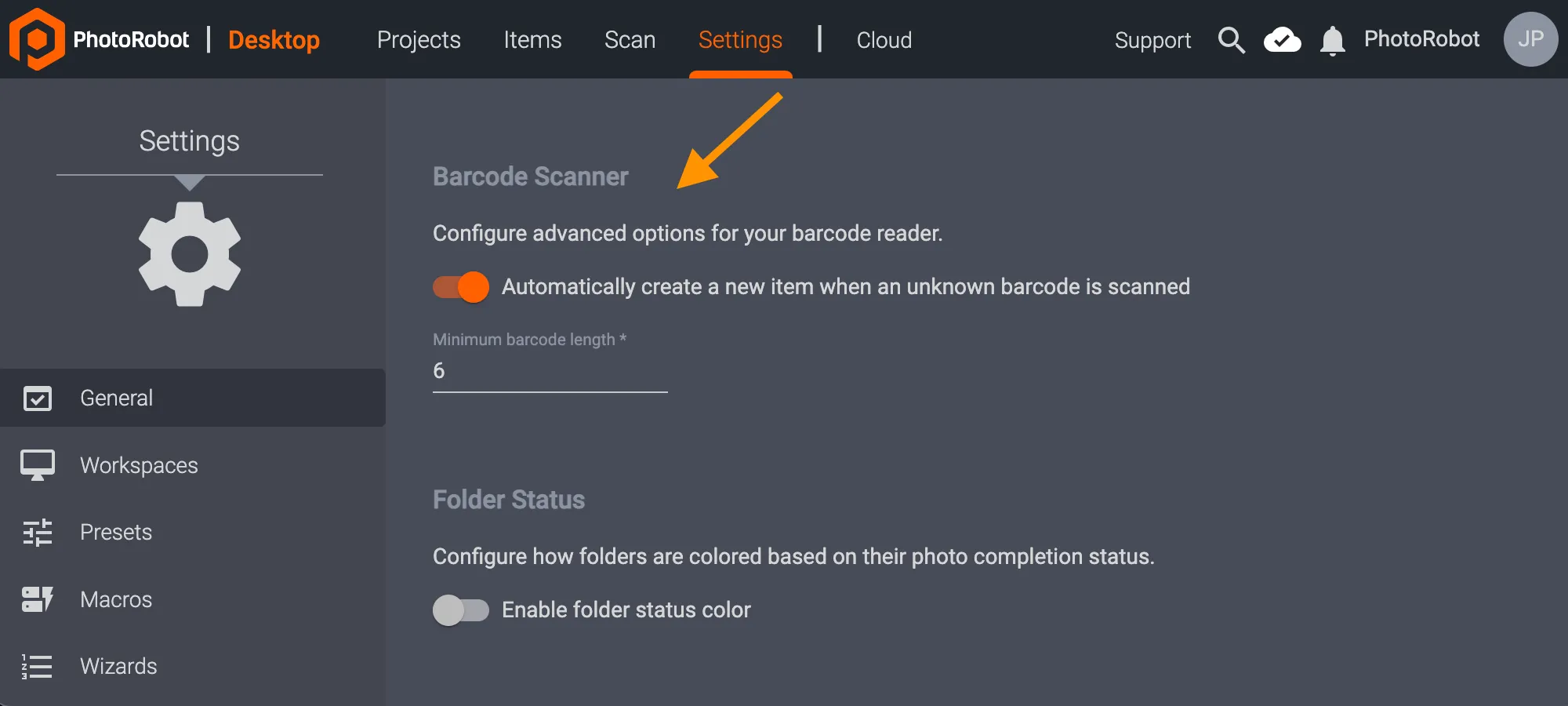
เมื่อเปิดใช้งาน การตั้งค่าจะทําหน้าที่เป็นทางเลือกแทนการสร้างรายการด้วยตนเอง ช่วยให้สามารถระบุรายการ ณ จุดที่จับได้ (โดยทั่วไปจะใช้บาร์โค้ดหรือรหัส QR) ผู้ปฏิบัติงานเพียงแค่สแกนรหัสที่ไม่รู้จัก และรายการใหม่จะถูกสร้างขึ้นโดยอัตโนมัติในโครงการ การตั้งชื่อรายการจะเป็นไปตามสตริงที่สแกนและในช่องตัวระบุของรายการ จากนั้นผู้ปฏิบัติงานจะถ่ายภาพรายการ
ด้วยวิธีนี้ ไม่จําเป็นต้องดําเนินการใดๆ ที่เกี่ยวข้องกับสินค้าคงคลังภายในซอฟต์แวร์สตูดิโอ ตัวอย่างเช่น การสแกนรายการใหม่และสแกนรหัสที่ตั้งไว้ล่วงหน้า (ชั้นวาง) สําหรับการถ่ายภาพในภายหลังก็เพียงพอแล้ว (เช่น สําหรับรายการสีขาว สีเข้ม หรือสีสันสดใส) จากนั้นระบบจะส่งภาพถ่ายครบชุดโดยอัตโนมัติและทันที
นอกจากนี้ ตั้งแต่ CAPP เวอร์ชัน 2.13.beta58 ขณะนี้มีตัวเลือกในการกําหนดค่าความยาวสตริงขั้นต่ําสําหรับบาร์โค้ด ก่อนหน้านี้ความยาวบาร์โค้ด / คิวอาร์โค้ดขั้นต่ําคือ 6 อักขระ (เพื่อหลีกเลี่ยงการตีความสตริงที่สแกนแบบคู่ท่ามกลางปัญหาอื่นๆ) ตอนนี้ การตั้งค่า ความยาวบาร์โค้ดขั้นต่ํา สามารถปรับได้เพื่อให้ตัวระบุสี่อักขระทํางานได้โดยไม่จําเป็นต้องปรับเปลี่ยนเพิ่มเติม
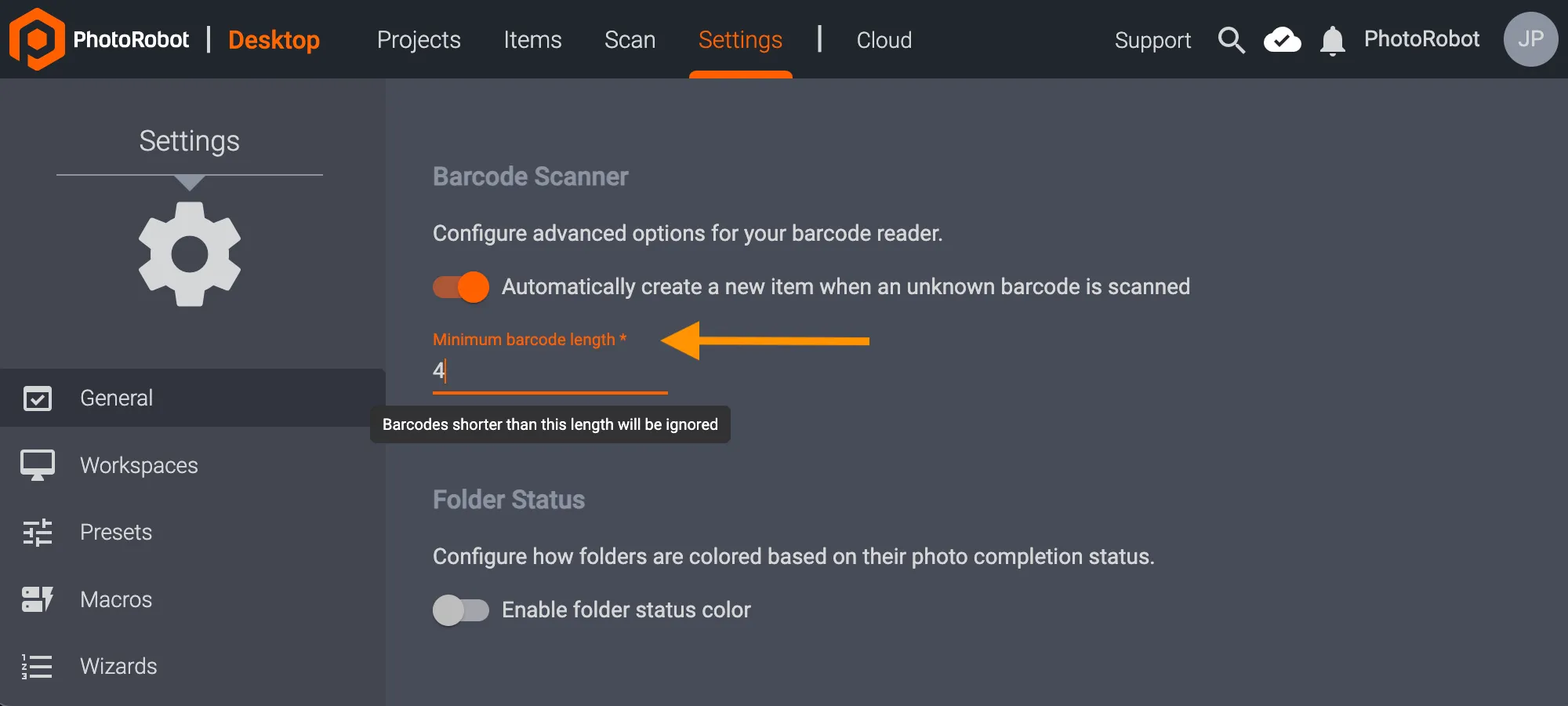
หากต้องการปรับความยาวสตริงขั้นต่ําสําหรับบาร์โค้ด / คิวอาร์โค้ด ให้กําหนดค่า ความยาวบาร์โค้ดขั้นต่ํา ใน CAPP เวอร์ชันท้องถิ่นใน การตั้งค่าทั่วไป - เครื่องสแกนบาร์โค้ด บาร์โค้ดที่สั้นกว่าความยาวที่ป้อนจะถูกละเว้นโดยระบบ
โน้ต: หลังจากที่ไอเท็มได้รับมอบหมายบาร์โค้ดในระบบแล้ว บาร์โค้ดจะสามารถเข้าถึงได้โดยตรงในอินเทอร์เฟซโหมดจับภาพในพื้นที่ข้อมูลไอเท็มผ่านปุ่ม บาร์โค้ด
การให้สิทธิ์การเข้าถึงข้อมูลโครงการจากภายนอกแก่ลูกค้า
ในการทํางานกับลูกค้าภายนอกองค์กรของบัญชี CAPP แบบชําระเงิน ผู้ดูแลระบบของบัญชีสามารถสร้าง บัญชีลูกค้าได้ฟรี บัญชีลูกค้าช่วยให้ลูกค้าภายนอกสามารถดูข้อมูลโครงการ มีส่วนร่วมในการประกันคุณภาพผ่านการตรวจสอบและความคิดเห็น และเข้าถึงสินทรัพย์โครงการเพื่อดาวน์โหลด คุณลักษณะนี้มีไว้สําหรับสถานการณ์ที่สตูดิโอถ่ายภาพกําลังทํางานกับลูกค้าภายนอกที่ต้องการการเข้าถึงงานเฉพาะ
ในการแชร์โครงการกับลูกค้าภายนอกองค์กร ก่อนอื่นให้แน่ใจว่าคุณเข้าสู่ระบบ CAPP เวอร์ชันคลาวด์โดยใช้โปรไฟล์ผู้ใช้ที่มีสิทธิ์ของผู้ดูแลระบบ
1. ลงชื่อเข้าใช้แอปบนคลาวด์โดยใช้โปรไฟล์บัญชี CAPP แบบชําระเงินพร้อมสิทธิ์ผู้ดูแลระบบ และคลิกที่ไอคอนเมนูโปรไฟล์ผู้ใช้ที่มุมบนขวาของแดชบอร์ด จากนั้นคลิก องค์กร เพื่อเข้าถึงแผงการดูแลระบบ
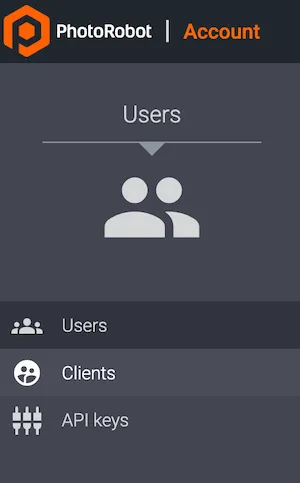
2. จากนั้น จากแผงการดูแลองค์กร ให้คลิก ผู้ใช้ จากตัวเลือก บัญชีที่ด้านบนของอินเทอร์เฟซผู้ใช้

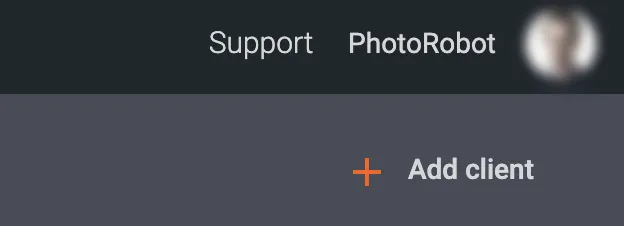
3. คลิก ลูกค้า เพื่อสร้างตัวเลือกผู้ใช้ใหม่เพื่อเข้าถึงคุณลักษณะเพิ่มลูกค้าจากอินเทอร์เฟซบัญชี ปุ่ม + เพิ่มไคลเอ็นต์ จะปรากฏที่ด้านบนขวาของแดชบอร์ดภายใต้ไอคอนโปรไฟล์ผู้ใช้
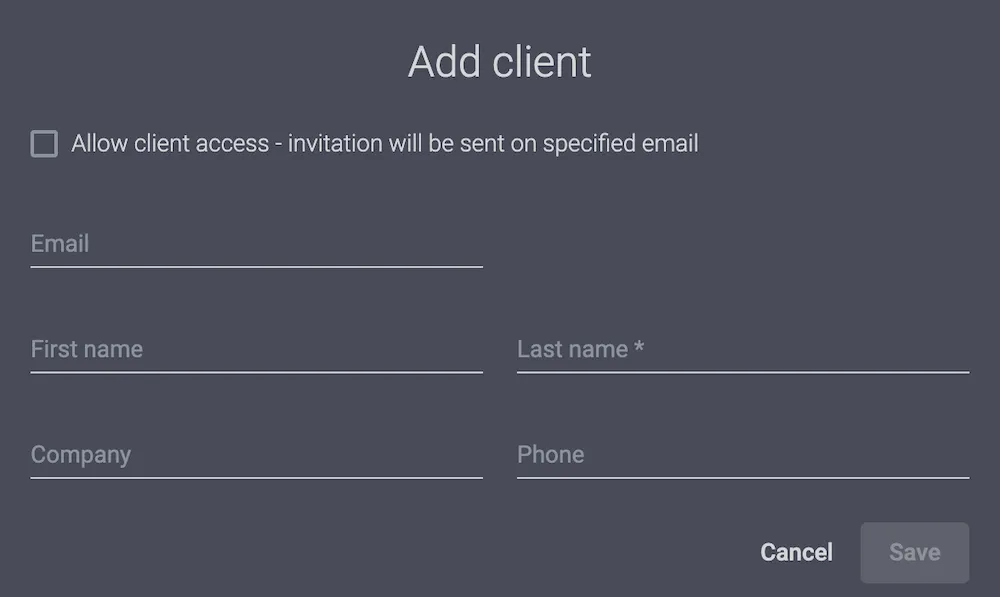
4. คลิก + เพิ่มไคลเอ็นต์ ใต้ไอคอนโปรไฟล์ผู้ใช้
5. กรอกข้อมูลของลูกค้า (อีเมล ชื่อ บริษัท โทรศัพท์) และทําเครื่องหมายในช่อง อนุญาตการเข้าถึงลูกค้า ตรวจสอบข้อมูลเพื่อความถูกต้อง แล้วคลิก บันทึก เพื่อเพิ่มไคลเอ็นต์ไปยัง CAPP
6. เปิด โครงการ ใน CAPP เวอร์ชันคลาวด์ค้นหาโครงการที่คุณต้องการแชร์กับไคลเอ็นต์ที่บันทึกไว้วางเมาส์เหนือแถบโครงการแล้วคลิกไอคอนแชร์ทางด้านขวาของรายละเอียดโครงการ
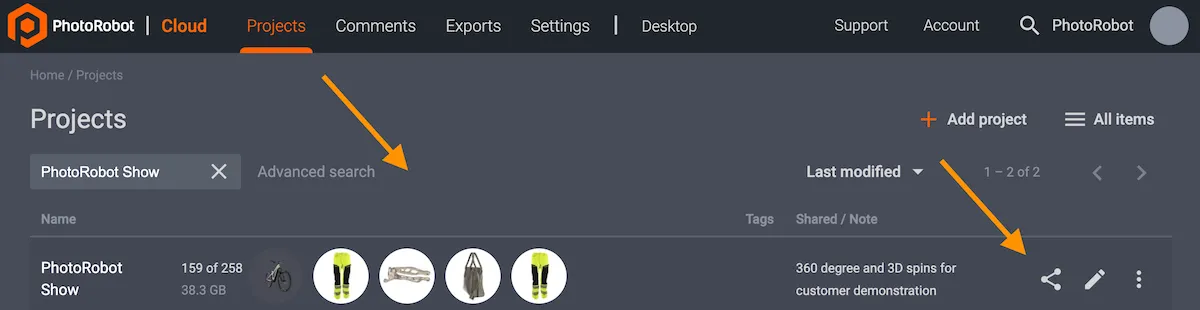
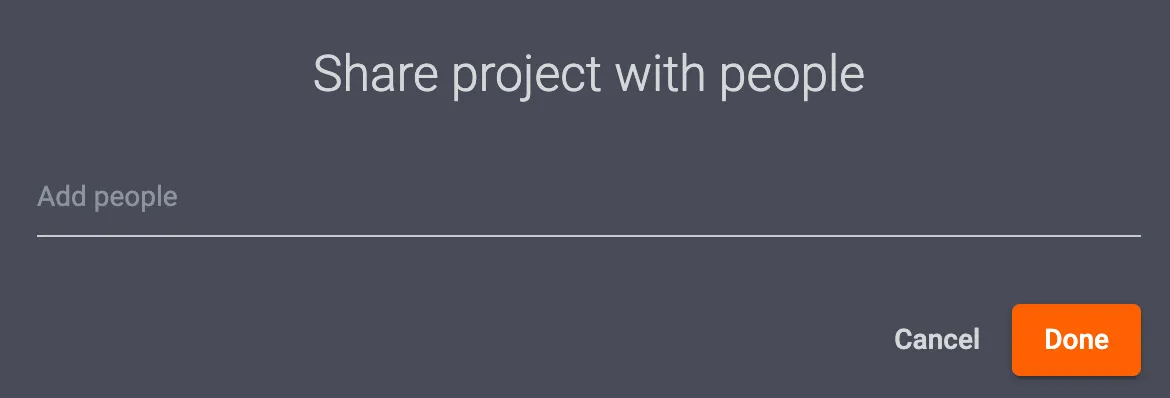
7. คลิกไอคอนแชร์ทางด้านขวาของแถบโครงการเพื่อเปิดไฟล์ แชร์โครงการกับผู้คน เลือกลูกค้าที่บันทึกไว้ แล้วคลิกเสร็จสิ้น ขณะนี้โครงการถูกแชร์กับลูกค้า ทําให้พวกเขาสามารถดูงานและแสดงความคิดเห็นใน CAPP เพื่อการประกันคุณภาพและคําแนะนําเพิ่มเติมหากจําเป็น
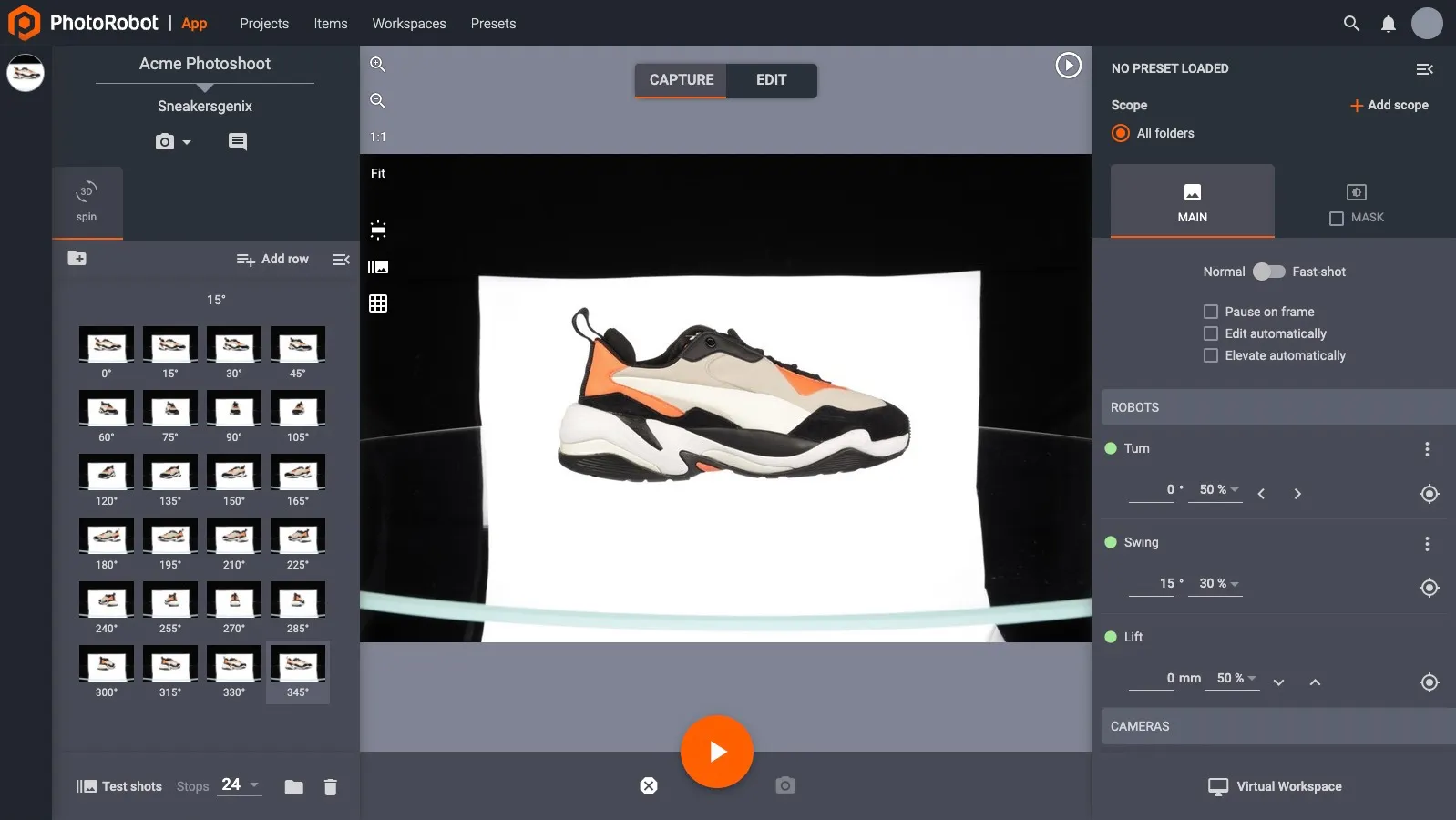
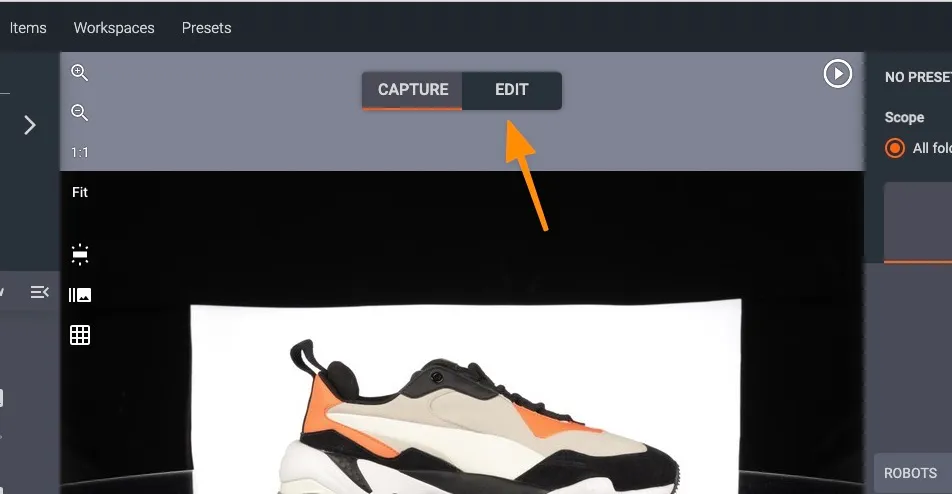
อินเทอร์เฟซโหมดการจับภาพ
หลังจากคลิกที่รายการคุณจะถูกนําไปยังอินเทอร์เฟซการจับภาพ / แก้ไข ตัวควบคุมที่พร้อมใช้งานสําหรับคุณเปลี่ยนแปลงโดยยึดตามโหมด การจับภาพ ที่ใช้งานอยู่ หรือโหมด แก้ไข โหมดการจับภาพจะใช้ในการควบคุมลําดับการถ่ายภาพ ในขณะที่โหมดแก้ไขจะควบคุมกระบวนการปรับแต่งภาพทั้งหมดที่ดําเนินการภายใน CAPP โหมดที่ใช้งานอยู่จะถูกเน้นที่ด้านบนของหน้าจอ:
การเพิ่มโฟลเดอร์สปิน ภาพนิ่ง หรือวิดีโอ
คุณต้องสร้างโฟลเดอร์อย่างน้อยหนึ่งโฟลเดอร์ก่อนถ่ายภาพ โฟลเดอร์ประเภทหลักคือการ หมุน (ใช้สําหรับงานนําเสนอ 360°) ภาพนิ่ง (สําหรับภาพนิ่ง) และวิดีโอ (สําหรับวิดีโอ)
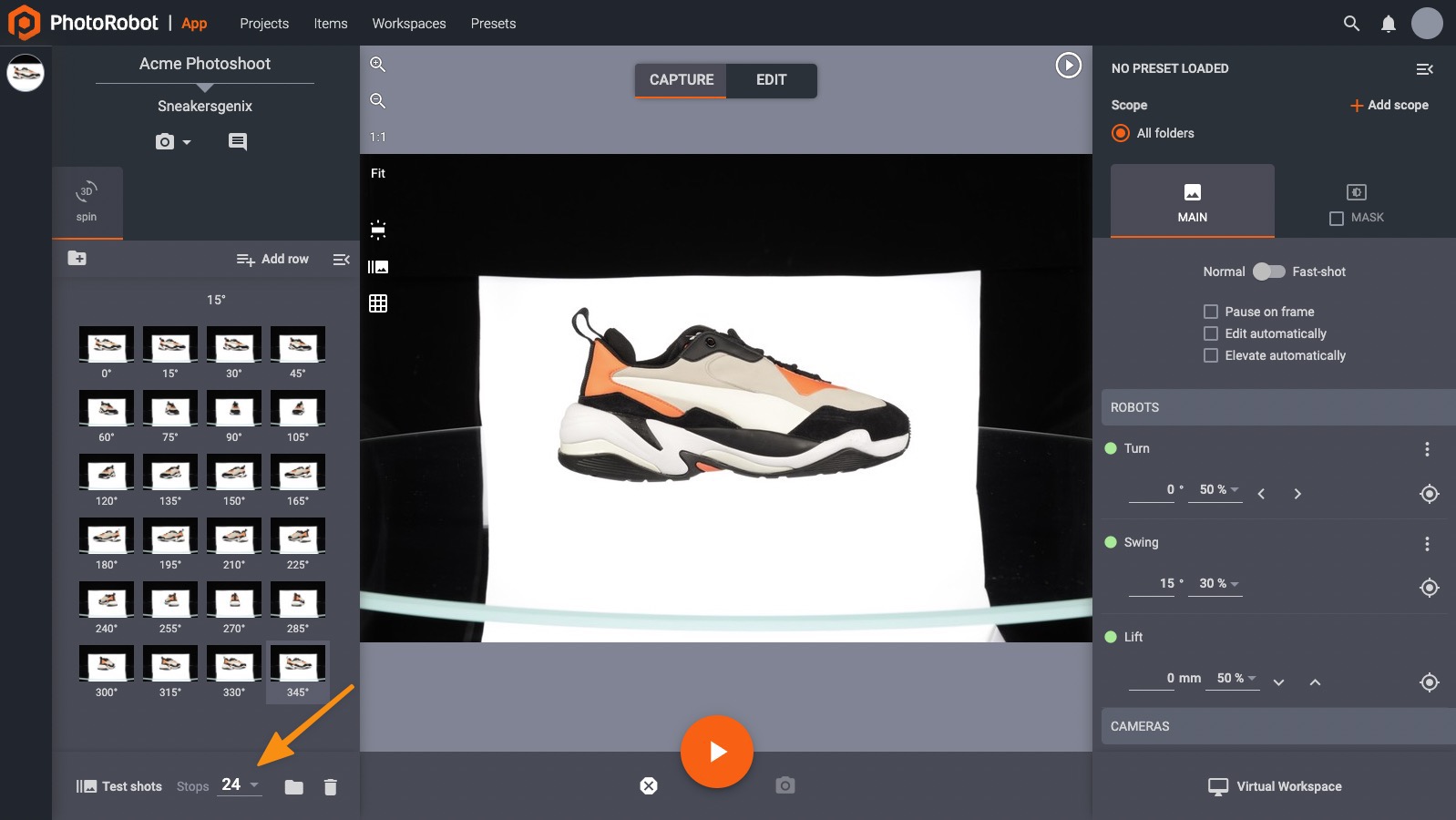
การสร้างโฟลเดอร์สปิน
เมื่อเพิ่มโฟลเดอร์สปิน CAPP จะเพิ่มสต็อปโดยอัตโนมัติ (หรือที่เรียกว่า "เฟรม") ตามจํานวนภาพต่อการหมุนที่คุณเลือก หมายเลขเริ่มต้นคือ 36 และสามารถเปลี่ยนแปลงได้ที่มุมล่างซ้าย ด้วยจํานวนจุดหยุดที่สูงขึ้นการหมุนจะราบรื่นขึ้น แต่ก็จะใช้พื้นที่จัดเก็บมากขึ้นเช่นกัน
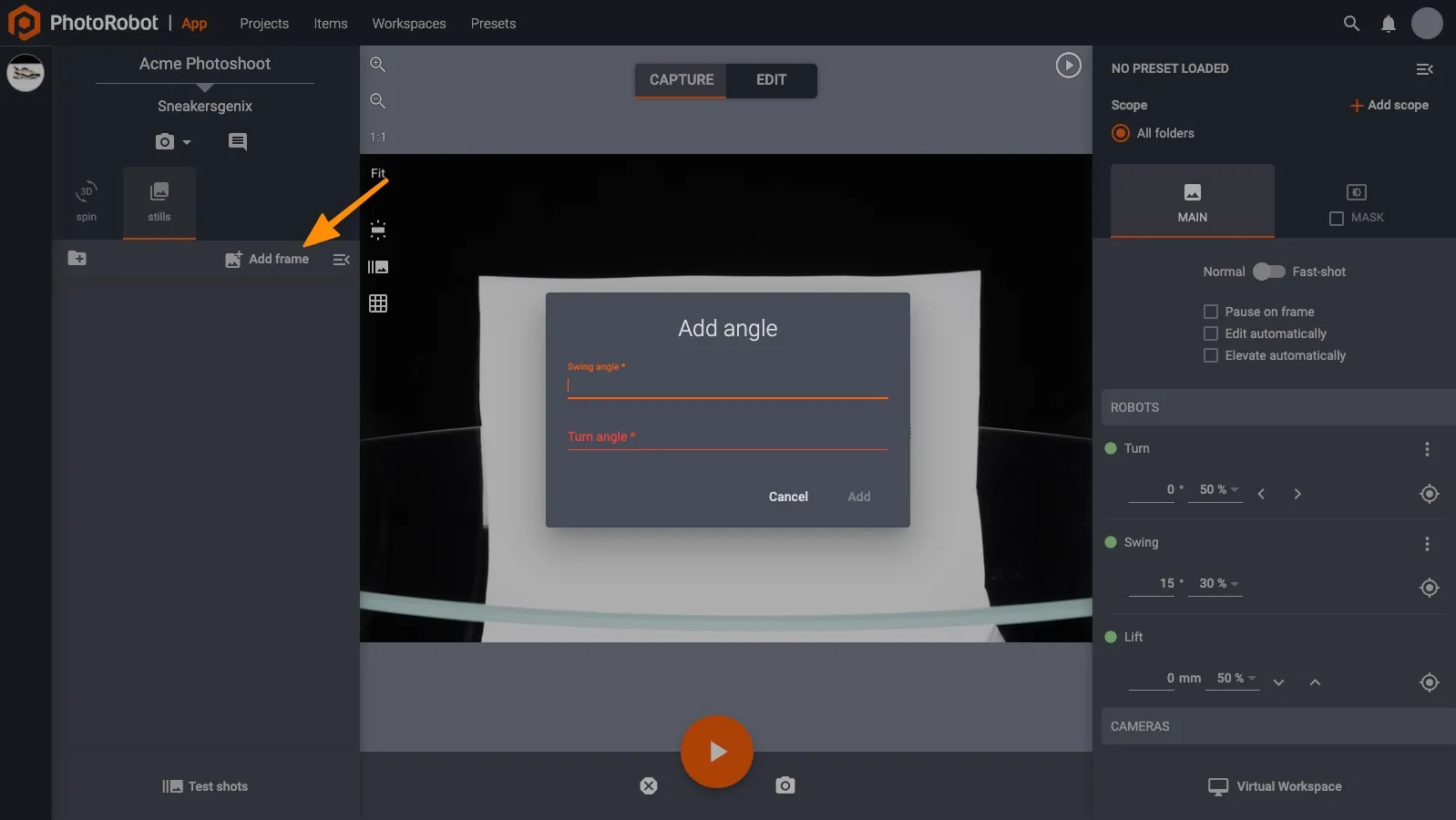
การสร้างโฟลเดอร์ภาพนิ่ง
ถ้าคุณเลือกโฟลเดอร์ภาพนิ่ง คุณต้องเพิ่มจุดหยุดของคุณด้วยตนเอง ซึ่งจะรวมถึง มุมเลี้ยว (มุมหมุน) และ มุมแกว่ง (ตําแหน่งแนวตั้งของกล้องตามวิถีวงกลม) มุมแกว่งเป็นสิ่งสําคัญหากคุณใช้ Robotic Arm ของเราหรือโมดูลอื่นที่สามารถเปลี่ยนตําแหน่งแนวนอนของกล้องได้
นําเข้ารูปภาพ
ในบางกรณี คุณอาจต้องการนําเข้ารูปภาพไปยังโฟลเดอร์ใหม่หรือโฟลเดอร์ที่มีอยู่ใน CAPP ยกตัวอย่างเช่น การนําเข้าภาพถ่ายมือถือ ภาพที่มีรายละเอียด หรือภาพเบ็ด เตล็ดอื่นๆ
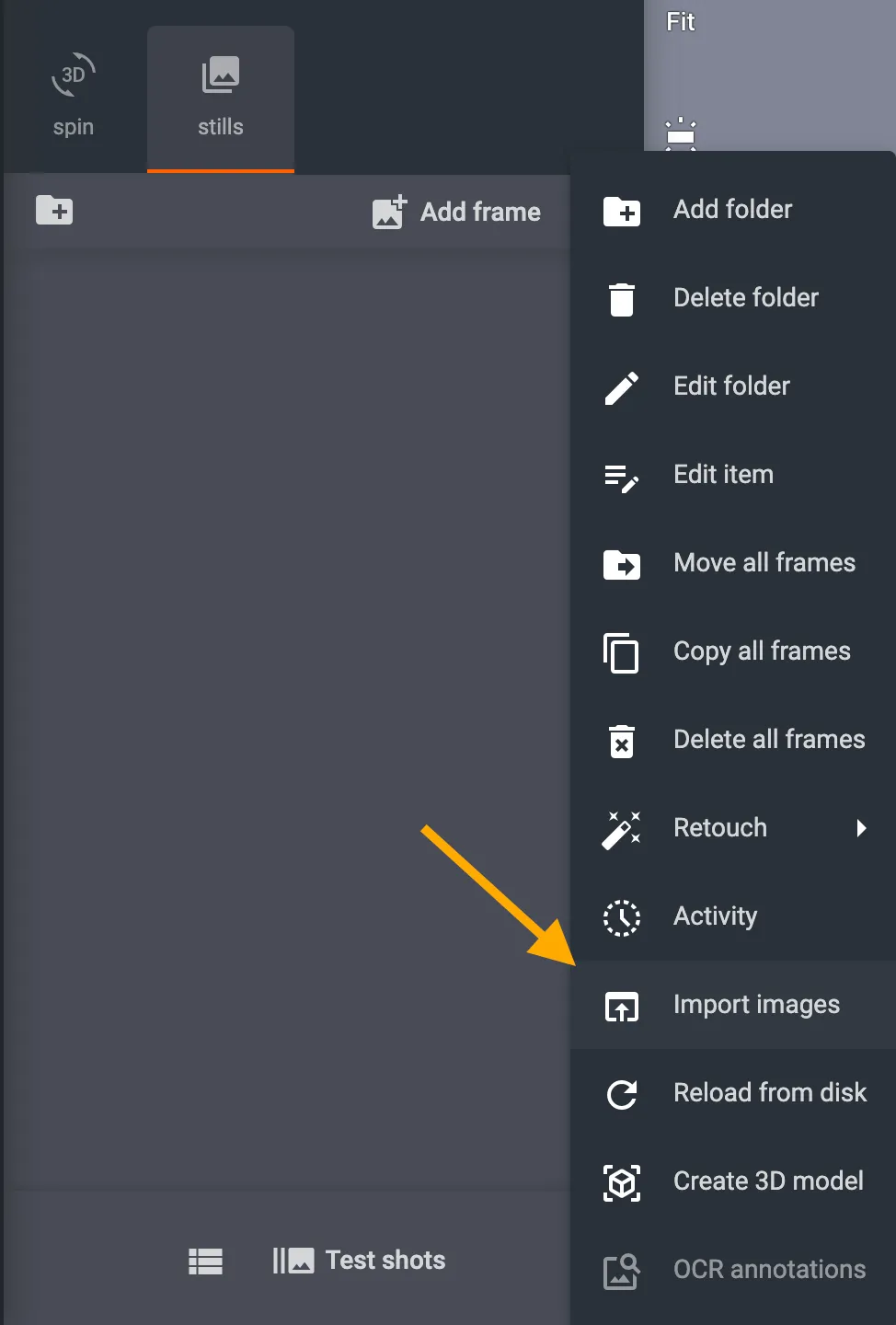
ในการนําเข้ารูปภาพไปยัง CAPP ก่อนอื่นให้เปิดรายการใหม่หรือรายการที่มีอยู่ในอินเทอร์เฟซโหมดจับภาพใน CAPP จากนั้นคลิกไอคอนสําหรับเมนูการทํางานของโฟลเดอร์ที่มุมบนขวาของอินเทอร์เฟซโฟลเดอร์
จากนั้น ในตัวเลือกเมนูการทํางานของโฟลเดอร์ ให้ค้นหาและคลิก นําเข้ารูปภาพ จากรายการ
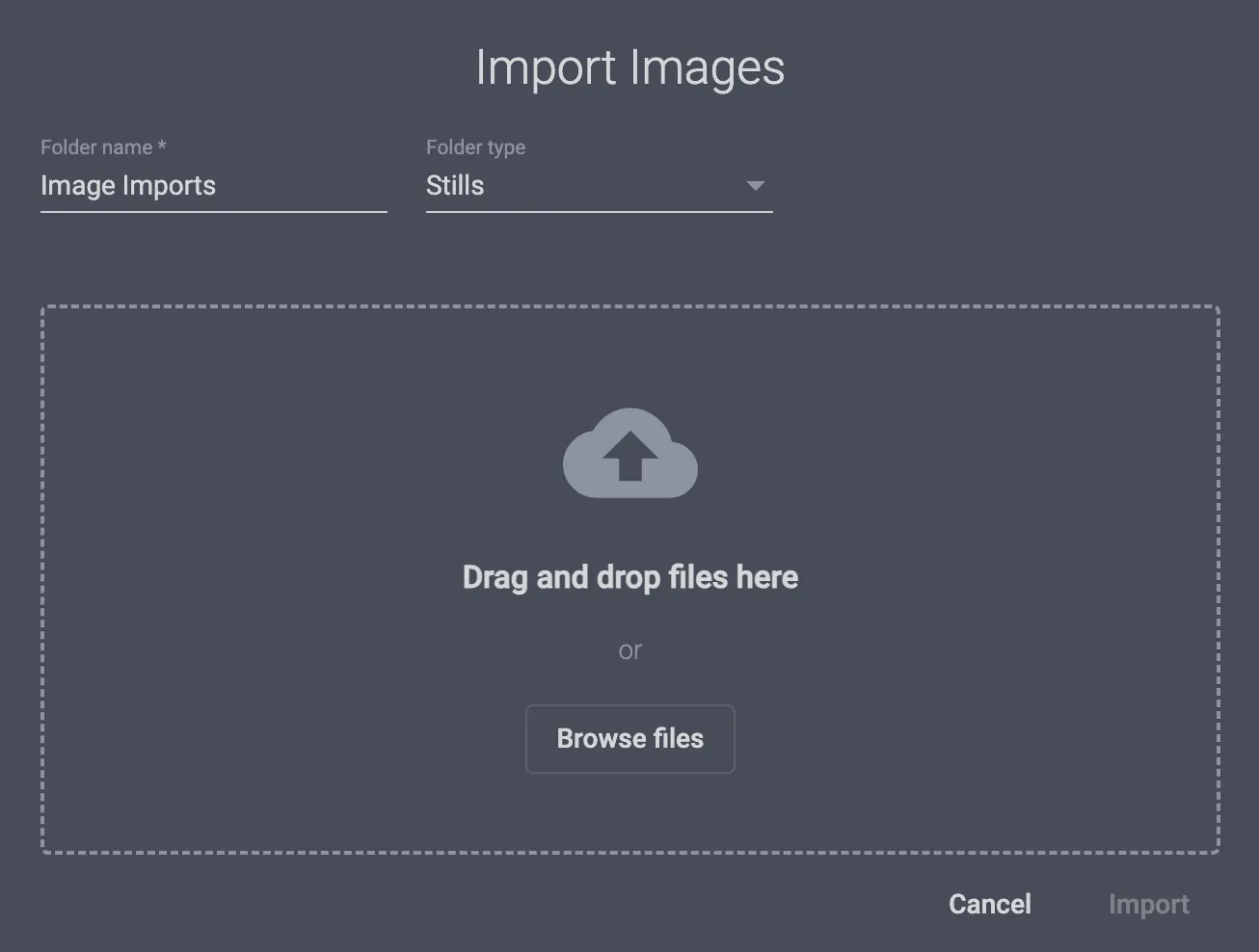
การคลิก นําเข้ารูปภาพ จะเป็นการเปิดหน้าต่างป๊อปอัปที่เปิดใช้งานการนําเข้ารูปภาพโดยการลากและวาง หรือโดยการเรียกดูไฟล์ในเครื่อง ที่ด้านบนของหน้าต่าง คุณยังสามารถกําหนดค่าชื่อโฟลเดอร์และประเภทโฟลเดอร์สําหรับรูปภาพที่นําเข้าได้อีกด้วย
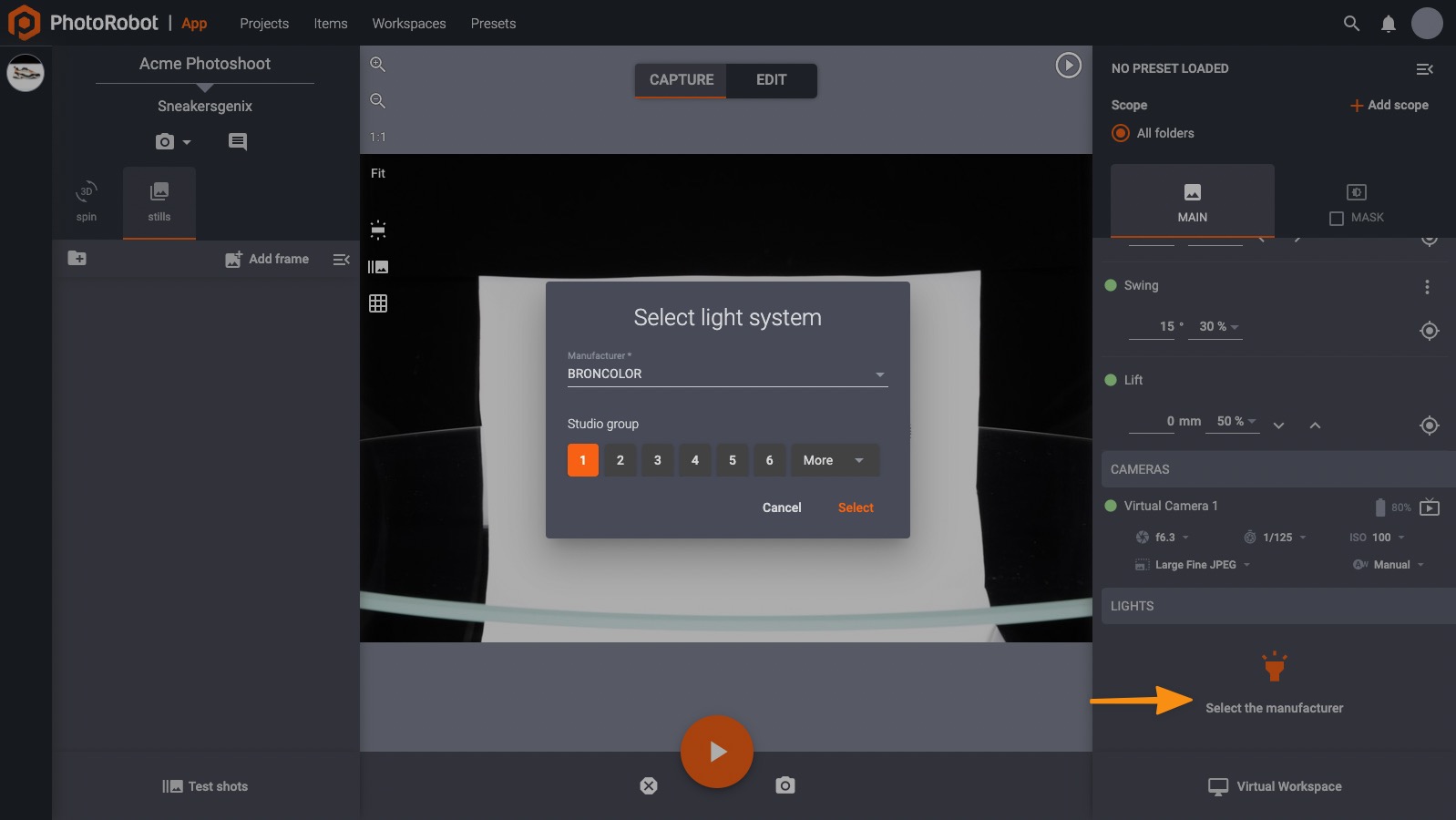
ควบคุมไฟที่รองรับ
เมื่อใช้ไฟที่เข้ากันได้กับ CAPP คุณสามารถเลือกไฟที่มุมล่างขวาของหน้าต่างโหมดแก้ไข
ภาพรวมอินเทอร์เฟซโหมดการจับภาพ
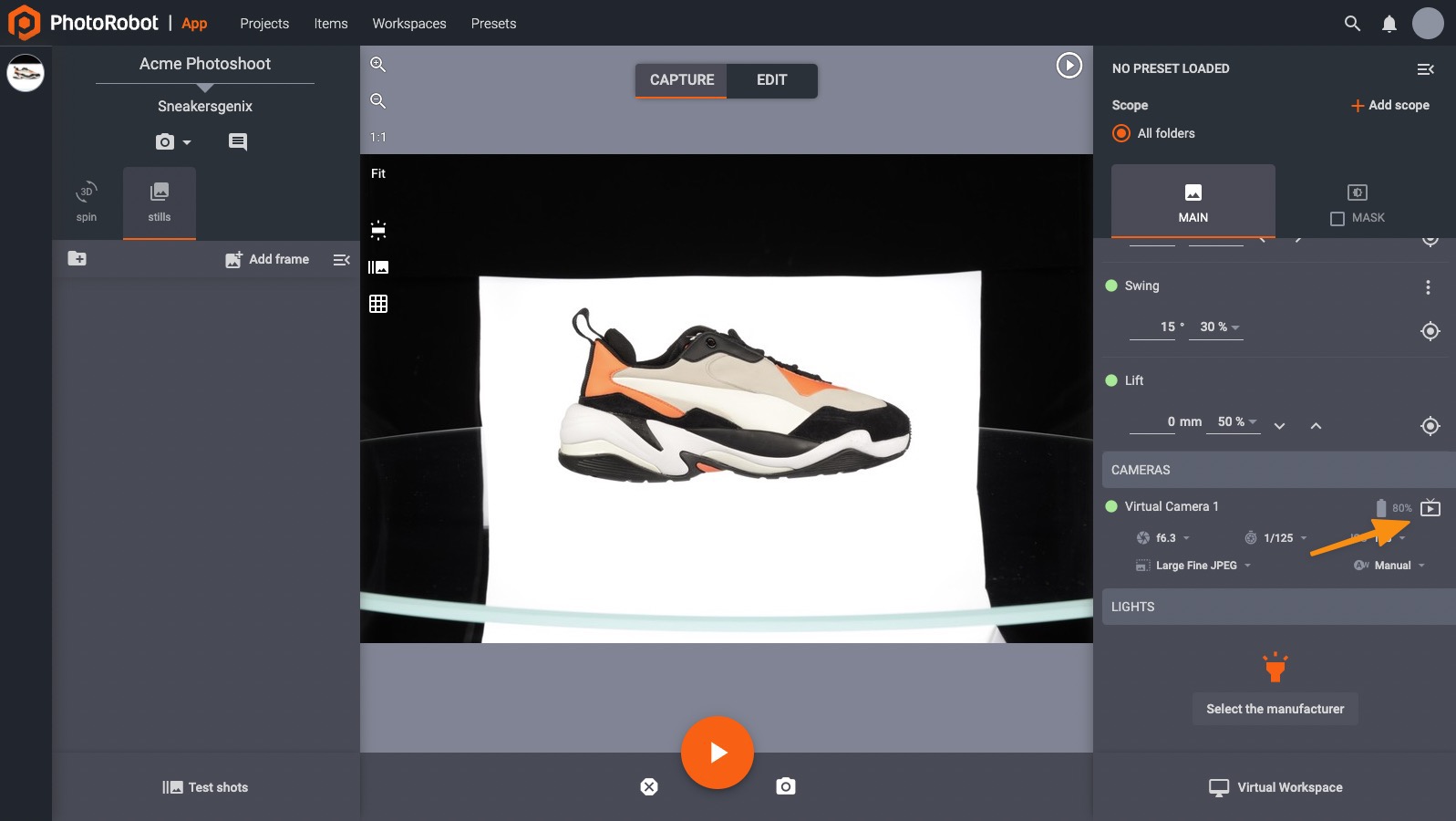
ส่วนกลางของอินเทอร์เฟซโหมดจับภาพประกอบด้วยหน้าต่างแสดงตัวอย่างซึ่งจะแสดงภาพที่เลือกในปัจจุบัน (หากคุณถ่ายไปแล้วบางส่วน) หรือมุมมองสดที่สตรีมจากกล้อง
Live View ซึ่งมีประโยชน์หากคุณต้องการตรวจสอบความสงบและโฟกัสสามารถสลับในพื้นที่ควบคุมกล้องในส่วนกลางของแถบควบคุมทางด้านขวาของหน้าจอ
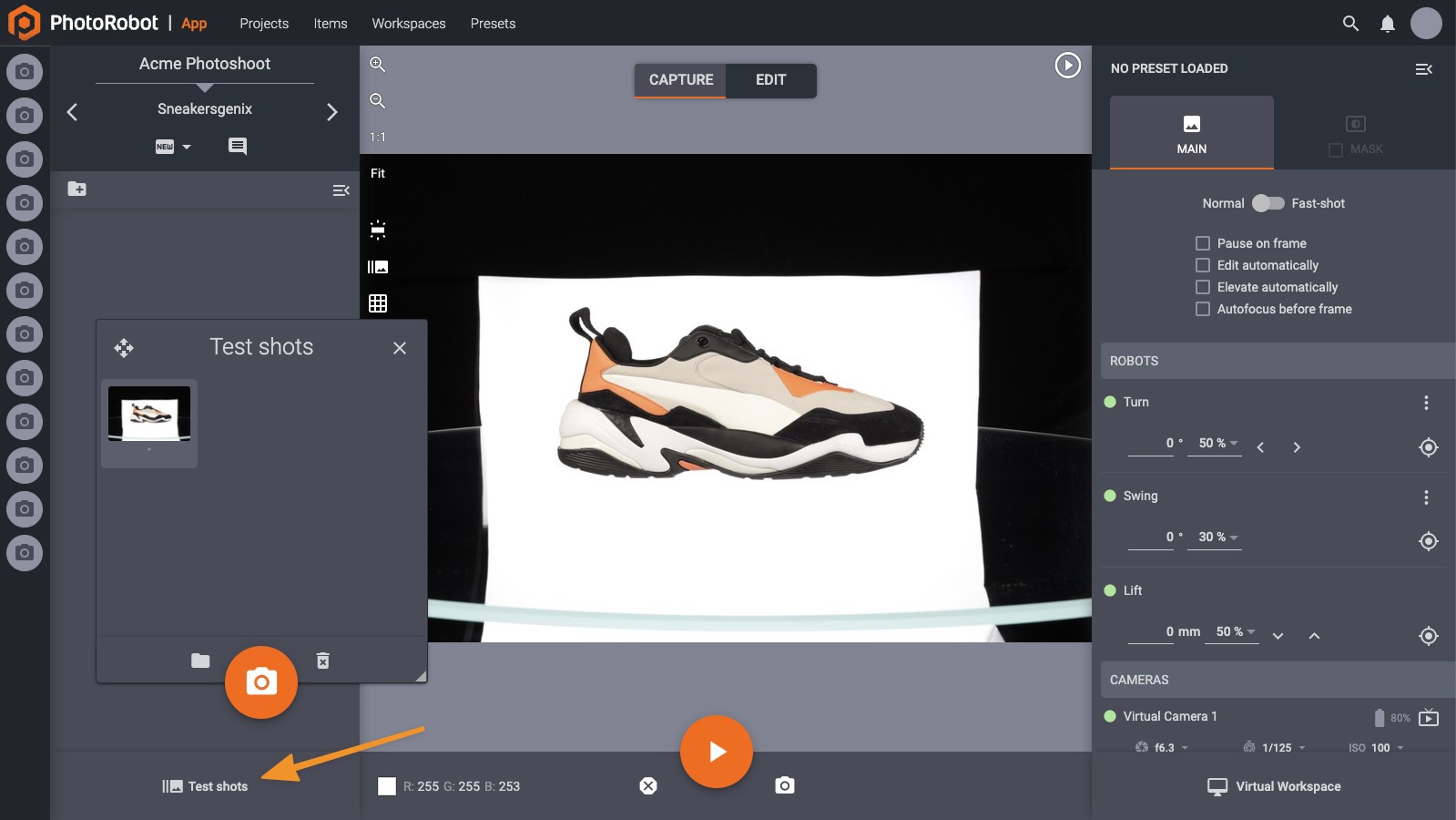
การถ่ายภาพทดสอบ
ก่อนที่จะถ่ายภาพสุดท้ายเป็นความคิดที่ดีที่จะถ่ายภาพทดสอบอย่างน้อยหนึ่งภาพ วิธีที่ง่ายที่สุดในการทําเช่นนี้คือการกดปุ่ม T บนแป้นพิมพ์คอมพิวเตอร์ของคุณ สิ่งนี้จะช่วยให้คุณตรวจสอบว่าคุณควรเปลี่ยนการตั้งค่าของไฟกล้อง ฯลฯ หรือไม่ ภาพทดสอบจะถูกเก็บไว้ในโฟลเดอร์ "ภาพทดสอบ" ซึ่งคุณสามารถเข้าถึงได้ในส่วนล่างซ้ายของหน้าจอ
การเริ่มลําดับการถ่ายภาพ
เมื่อพอใจกับการตั้งค่าซึ่งได้รับการตรวจสอบโดยการถ่ายภาพทดสอบแล้วก็ถึงเวลาที่จะเรียกใช้ลําดับการถ่ายภาพ สิ่งนี้สามารถเรียกใช้ได้โดยการกดแถบพื้นที่บนแป้นพิมพ์ของคุณหรือโดยคลิกปุ่ม "เริ่ม" ที่แสดงในภาพด้านล่าง
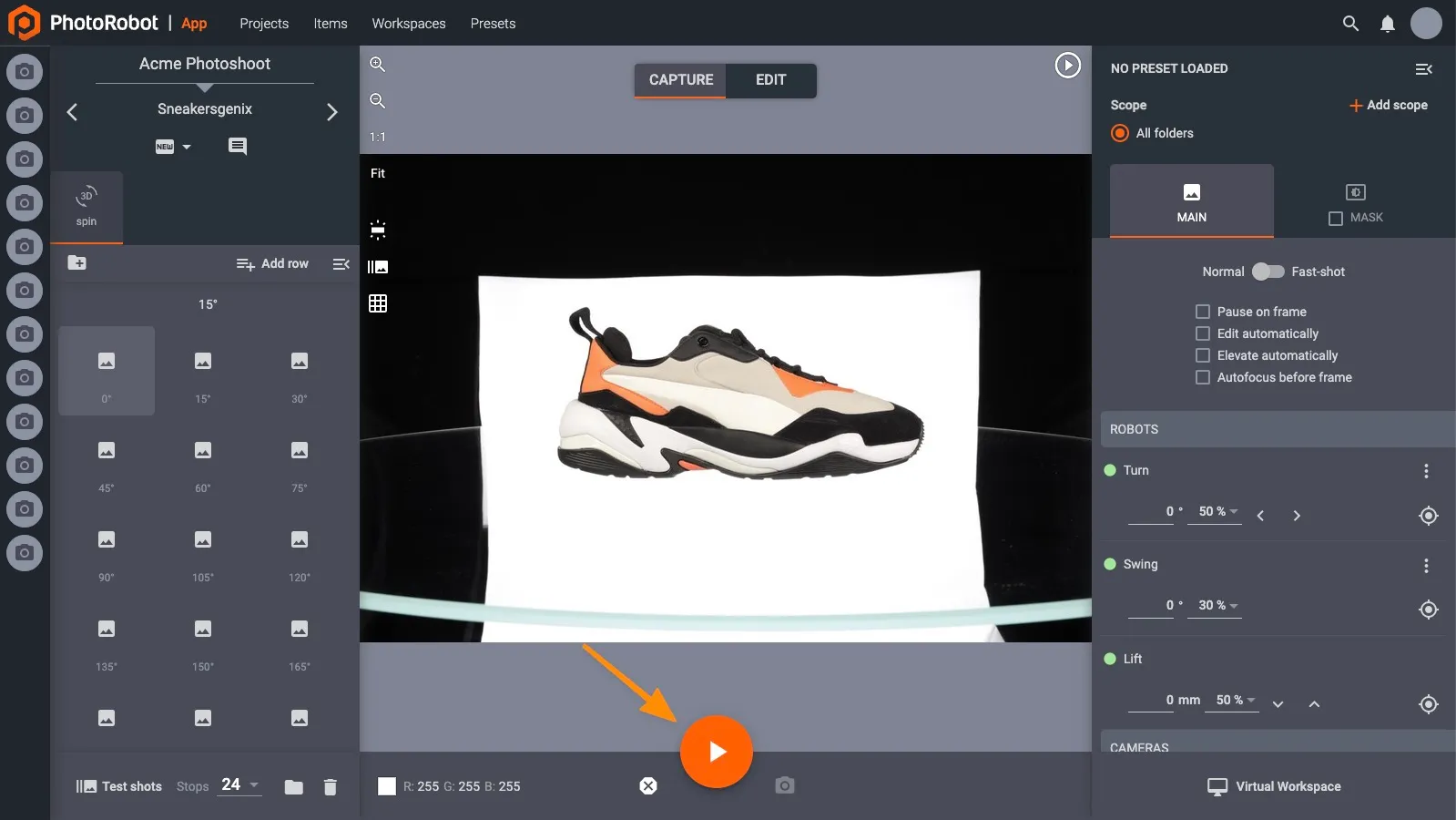
หากคุณมีเครื่องสแกนบาร์โค้ด คุณยังสามารถเรียกใช้ลําดับได้โดยการสแกนบาร์โค้ด "เริ่ม" พิเศษ ดาวน์โหลดบาร์โค้ด "เริ่ม" ของ PhotoRobot ทางออนไลน์ และพิมพ์ออกมาเพื่อใช้คุณสมบัตินี้

คุณจะรู้ว่าลําดับเสร็จสิ้นแล้วหากภาพขนาดย่อทั้งหมดทางด้านซ้ายมือเต็มไปด้วยรูปภาพ มันเป็นวิธีปฏิบัติที่ดีที่จะใส่ใจกับความผิดพลาดที่อาจเกิดขึ้นของไฟ แฟลช
หากภาพขนาดย่อใด ๆ มืดกว่าเมื่อเทียบกับภาพอื่น ๆ ให้ลดความเร็วในการหมุนหรือหากจําเป็นให้ตรวจสอบสภาพของไฟของคุณ จากนั้นคุณสามารถทําเครื่องหมายภาพเหล่านี้และถ่ายภาพใหม่ได้โดยไม่ต้องเรียกใช้ลําดับทั้งหมดอีกครั้ง
เมื่อลําดับการจับภาพเสร็จสมบูรณ์คุณสามารถสลับไปยังโหมดแก้ไขซึ่งเป็นที่ที่คุณจะดําเนินการปรับแต่งภาพ
PhotoRobot มาโคร
แมโครใน CAPP ช่วยให้ผู้ใช้สามารถกําหนดคําสั่งสําหรับกระบวนการจับภาพของรายการและโฟลเดอร์ (หมุนภาพนิ่ง ฯลฯ ) คําสั่งสามารถนําไปใช้กับแต่ละโฟลเดอร์หรือหลายโฟลเดอร์เรียกใช้ลําดับการแก้ไขภาพพื้นที่ทํางานที่ตั้งไว้ล่วงหน้าคัดลอกการตั้งค่าภาพและย้ายการตั้งค่าภาพ ผู้ใช้ยังสามารถปรับแต่งมาโครเพิ่มเติมตามชื่อ บาร์โค้ด แท็ก หรือบันทึกย่อได้อีกด้วย
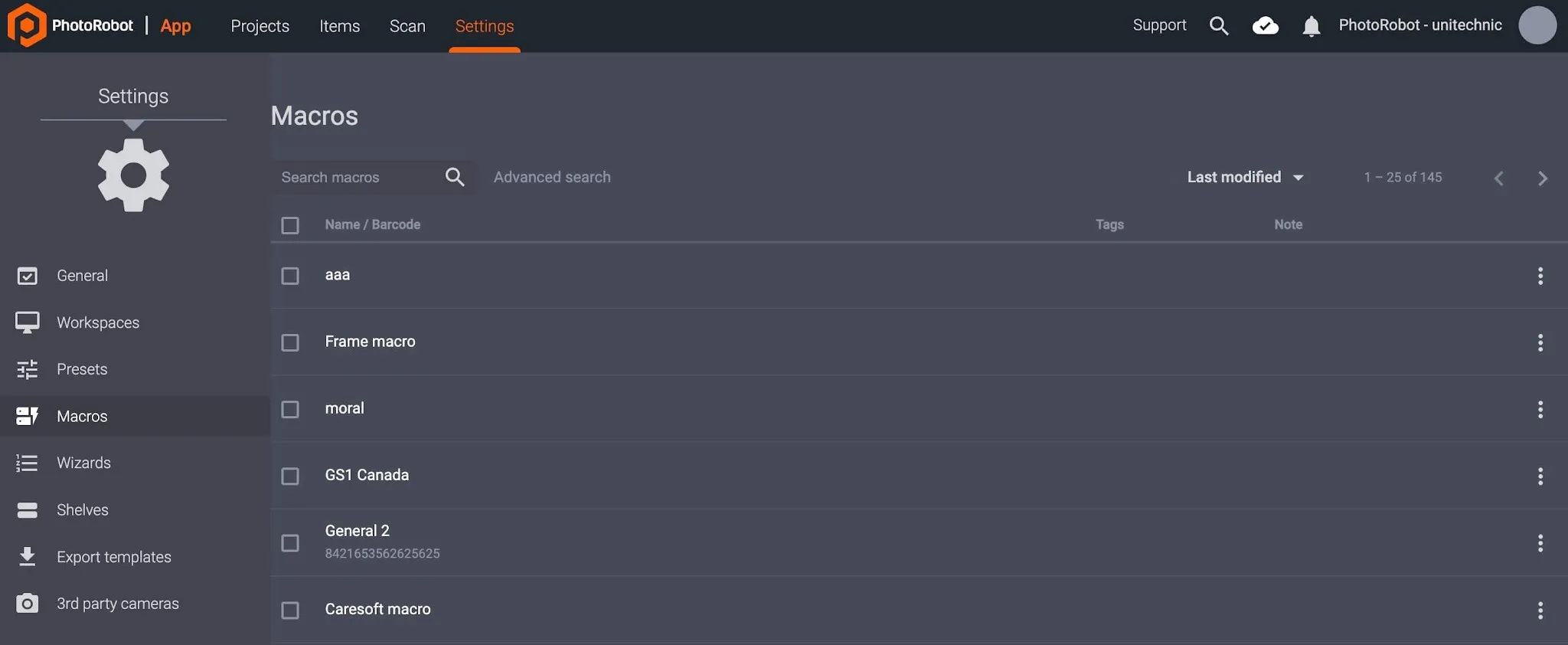
หมายเหตุ: สำหรับคำแนะนำโดยละเอียดเกี่ยวกับการกำหนดค่าและการใช้งาน PhotoRobot Macros โปรดดูที่ คู่มือผู้ใช้ PhotoRobot Macros ค้นหาว่า Macros ช่วยให้การถ่ายภาพอัตโนมัติ มหัศจรรย์ ได้อย่างไรในหลายโฟลเดอร์และส่วนประกอบ พร้อมกับการประมวลผลงานที่ซับซ้อนโดยอัตโนมัติ
โหมด PhotoRobot Wizards
โหมด Wizards ใน CAPP ทำหน้าที่เป็นทางเลือกแทนการกำหนดค่าฮาร์ดแวร์ กล้อง และลำดับด้วยตนเอง ในการใช้งาน โหมด Wizards ช่วยให้ผู้ดูแลระบบหรือช่างภาพสามารถสร้าง Wizards ที่แตกต่างกันเพื่อลดความซับซ้อนของโหมดการจับภาพสำหรับผู้ปฏิบัติงานในสายการผลิต จากนั้นผู้ปฏิบัติงานสามารถเริ่ม CAPP ในโหมด Wizards ซึ่งทำหน้าที่เป็นอินเทอร์เฟซที่เรียบง่ายอย่างยิ่งพร้อมขั้นตอนที่แนะนำโดย wizard นอกจากนี้ยังมีส่วนควบคุมที่จำกัดเพื่อความสะดวกในการใช้งานและการเริ่มต้นใช้งาน
หลังจากสร้างวิซาร์ดแล้ว ระบบจะจัดเก็บการกำหนดค่า Presets และ Workspace รวมถึงขั้นตอนที่กำหนดไว้ล่วงหน้าที่ผู้ปฏิบัติงานต้องปฏิบัติตาม ผู้ปฏิบัติงานไม่สามารถปรับการตั้งค่าใดๆ ได้ และต้องทำตามคำแนะนำในแต่ละขั้นตอนให้เสร็จสิ้นก่อนจึงจะสามารถดำเนินการในขั้นตอนถัดไปได้
หมายเหตุ: ขั้นตอนของวิซาร์ดถูกกำหนดในรูปแบบภาษาที่คล้าย JavaScript และเขียนสคริปต์โดยที่ปรึกษา PhotoRobot สำหรับฟังก์ชันที่กำหนดเอง ผู้ใช้ยังสามารถเขียนสคริปต์ฟังก์ชันพื้นฐานสำหรับการทดลองเบื้องต้นหรือการตั้งค่าอย่างง่ายได้ สำหรับเอกสารเกี่ยวกับการกำหนดค่าทางเทคนิคและการใช้งานวิซาร์ดโดยผู้ปฏิบัติงาน โปรดดูที่ คู่มือผู้ใช้ PhotoRobot Wizard Mode
แก้ไขอินเทอร์เฟซโหมด
ทางด้านขวาของหน้าจอ คุณสามารถเพิ่มการดําเนินการแก้ไขได้หลายแบบดังนี้
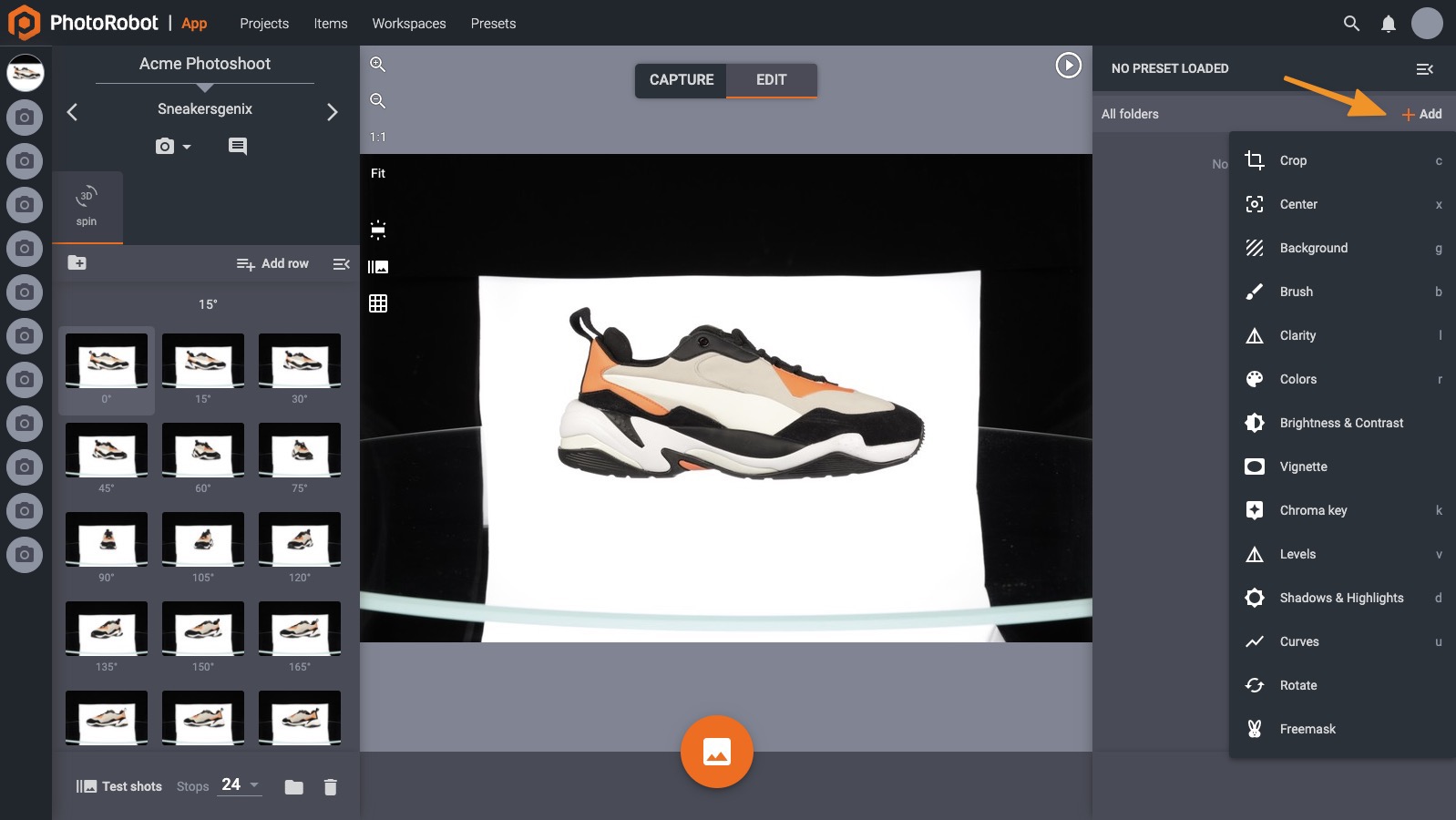
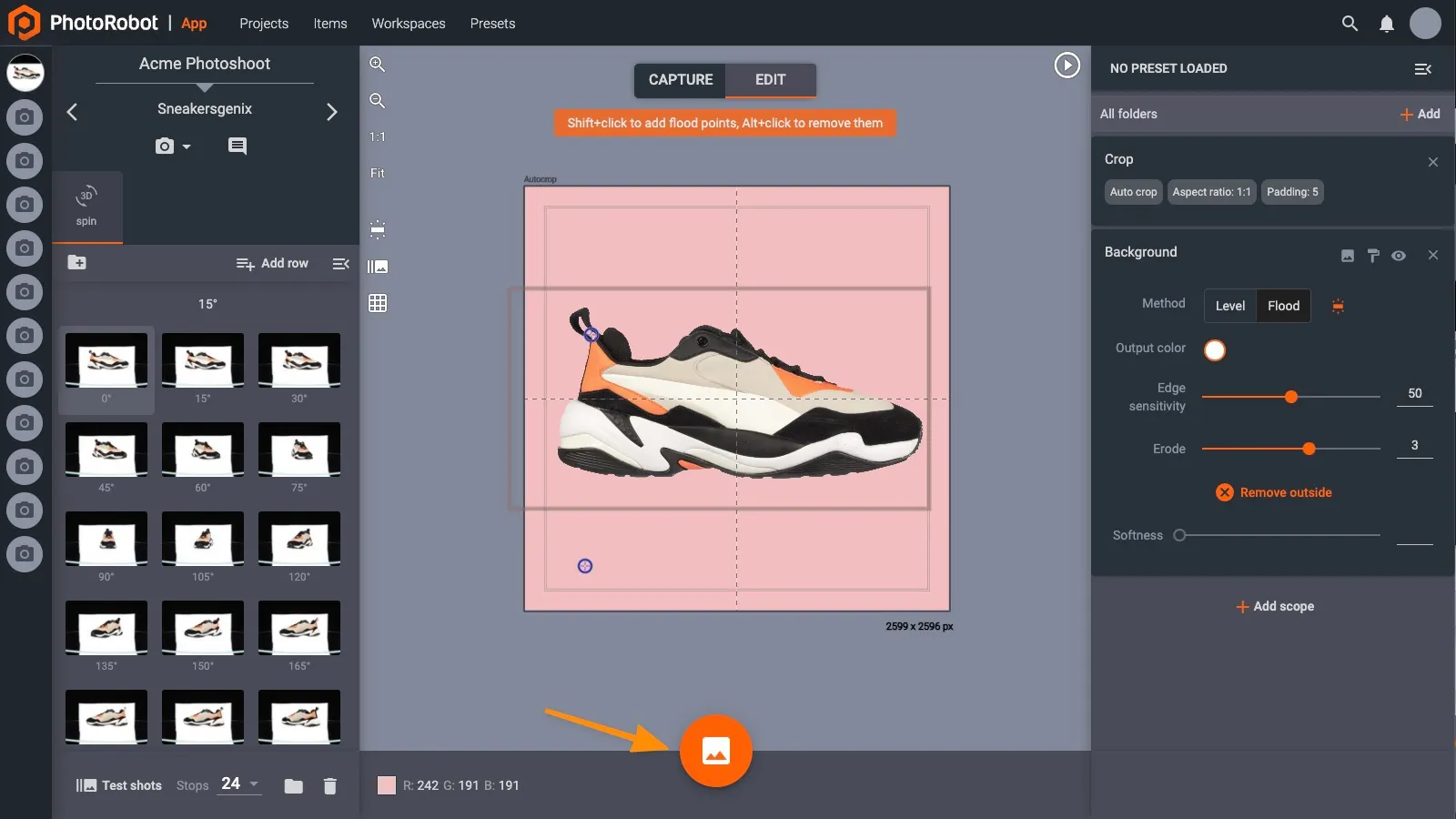
การดําเนินการแก้ไขที่พบบ่อยที่สุดบางส่วนจะแสดงที่ด้านบน: ครอบตัด กึ่งกลาง และพื้นหลัง
ครอบตัดอัตโนมัติ
ครอบตัด - เมื่อครอบตัดภาพมีตัวควบคุมหลักสามตัว: การสลับสําหรับการครอบตัดอัตโนมัติอัตราส่วนภาพและช่องว่าง (ซึ่งควบคุมจํานวนพื้นที่รอบวัตถุที่ถ่าย)

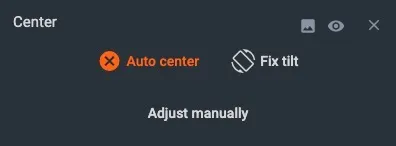
จัดกึ่งกลางอัตโนมัติ
ศูนย์ - แม้ว่าเครื่องPhotoRobotส่วนใหญ่จะติดตั้งเลเซอร์ที่ช่วยในการวางตําแหน่งวัตถุบนพื้นผิว แต่ภาพส่วนใหญ่จะต้องมีการจัดกึ่งกลางซอฟต์แวร์เพิ่มเติม นี่เป็นสิ่งสําคัญอย่างยิ่งสําหรับการหมุน 360 ° เมื่อเริ่มต้นขอแนะนําให้เปิดฟังก์ชั่น "auto center" ไว้ตามที่เห็นในภาพด้านล่าง:
การเอาพื้นหลังออก
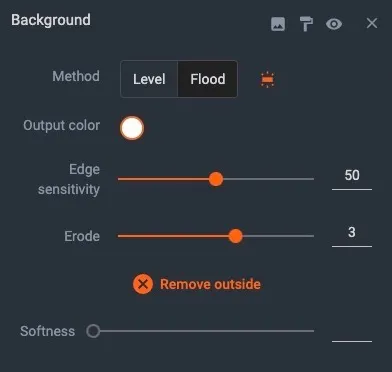
การดําเนินการ พื้นหลังจะ ปรับพื้นหลังของรูปภาพหรือชุดรูปภาพ โดยลบพื้นหลังออกทั้งหมดหากต้องการ ผลลัพธ์ที่แตกต่างกันสามารถทําได้ด้วยวิธีการลบพื้นหลังที่แตกต่างกันสามวิธีใน CAPP มีการลบพื้นหลังตามระดับ การลบพื้นหลังโดยน้ําท่วม และโดยการปิดบังฟรี
- การลบพื้นหลังตามระดับจะใช้ การวิเคราะห์ซอฟต์แวร์ของระดับสี RGB และค่าความสว่างเพื่อระบุพื้นหลังและเบื้องหน้า วิธีนี้มีประโยชน์เมื่อถ่ายภาพสิ่งของที่สว่างหรือสีขาว และเมื่อใช้ฉากหลังสีขาว ปรับระดับในซอฟต์แวร์เพื่อทําให้ความสว่างของพื้นหลังมีความเข้มสูงขึ้นจนกลายเป็นสีขาวบริสุทธิ์ จากนั้นจึงสามารถทําให้พื้นหลังโปร่งใสหรือสลับพื้นหลังสีต่างๆ
- การลบพื้นหลังโดยน้ําท่วม ทําหน้าที่ตามหลักการที่คล้ายคลึงกับการลบพื้นหลังตามระดับ และมักมีประโยชน์เมื่อถ่ายภาพสิ่งของที่มืดกว่า การลบพื้นหลังโดยการดําเนินการน้ําท่วมจะทําให้ความสว่างของพื้นหลังเข้มขึ้นจนกระทั่งกลายเป็นสีขาวบริสุทธิ์รอบๆ รายการ อย่างไรก็ตาม แทนที่จะปรับระดับ เครื่องมือจะใช้จุดที่เลือกเพื่อระบุพื้นหลัง จากนั้น "ท่วม" พื้นที่นั้น ผู้ใช้เพียงคลิกจุดด้านนอกของวัตถุที่ถ่ายภาพ จากนั้นซอฟต์แวร์จะตรวจจับขอบของวัตถุและใช้น้ําท่วมเพื่อเติมพื้นที่ว่างรอบๆ
- การลบพื้นหลัง Freemasking ต้องการการกําหนดค่ามากกว่าการใช้ระดับหรือน้ําท่วม แต่อาจเป็นหนึ่งในวิธีที่แม่นยําและรวดเร็วที่สุด วิธีนี้ใช้ภาพมาสก์คัตเอาท์และภาพหลักของผลิตภัณฑ์ โดยจัดองค์ประกอบภาพทั้งสองเพื่อ ลบพื้นหลัง บางครั้งนี่เป็นวิธีเดียวที่มีประสิทธิภาพในการลบพื้นหลังรอบๆ วัตถุที่ "ยาก" มากขึ้น ยกตัวอย่างสิ่งของสะท้อนแสงหรือวัตถุที่มีพื้นที่ว่าง Freemasking ระบุวัตถุเทียบกับพื้นที่ว่างทั้งหมด ในขณะที่ลบพื้นหลังรอบๆ รายการและภายในหากจําเป็น อย่างไรก็ตาม วิธีนี้ต้องการการกําหนดค่าไฟสตูดิโอเพิ่มเติมเพื่อสร้างภาพหลักและมาสก์สําหรับการลบพื้นหลัง
โน้ต: โปรดจําไว้ว่า CAPP จะสามารถลบพื้นหลังได้หรือไม่ ขึ้นอยู่กับวิธีการให้แสงสว่างของฉากเป็นหลัก หากคุณไม่พบการตั้งค่าที่เหมาะกับความพึงพอใจ ให้ถ่ายภาพใหม่ด้วยการตั้งค่าแสงที่แตกต่างกัน
เมื่อคุณพอใจกับการตั้งค่าการแก้ไขของคุณให้ใช้พารามิเตอร์โดยคลิกปุ่ม "นําไปใช้" ซึ่งตั้งอยู่ที่ปุ่ม "เริ่มต้น" ก่อนหน้านี้ปรากฏขึ้น
กําลังประกาศรูป
เมื่อแถบความคืบหน้าสิ้นสุดลงการแก้ไขของคุณจะถูกนําไปใช้กับรูปภาพของคุณเรียบร้อยแล้ว หากคุณใช้ CAPP โดยไม่มีบริการ cloud PhotoRobot ภาพที่ได้จะถูกเก็บไว้ในโครงสร้างโฟลเดอร์บนไดรฟ์ ภายในเครื่องของคุณ
หากใช้โฮสติ้งคลาวด์PhotoRobotไฟล์สามารถพบได้ในที่เก็บข้อมูลบนคลาวด์PhotoRobot เมื่อต้องการเข้าถึงสิ่งเหล่านี้ ให้คลิก เปิด ใน Cloud ในส่วนรูปภาพ ที่ส่วนบนซ้ายของหน้าจอ
กําลังส่งออกรูป
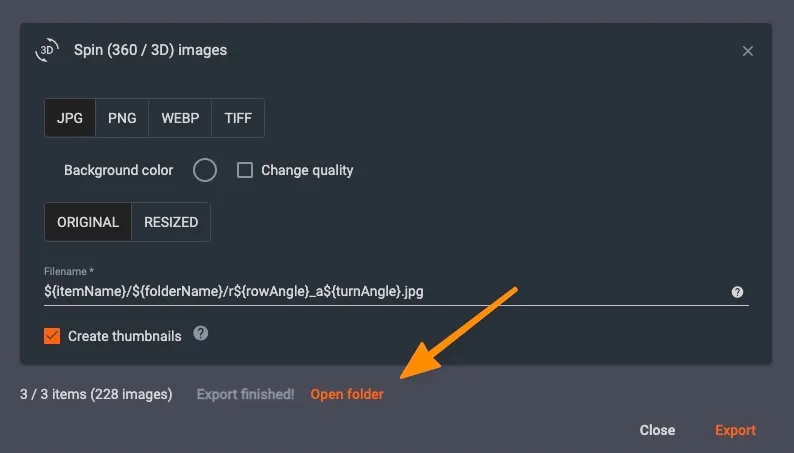
หากต้องการส่งออกรายการจาก CAPP ผู้ใช้สามารถส่งออกไปยังดิสก์ภายในเครื่องหรือส่งออกไปยัง PhotoRobot Cloud การส่งออกรายการทําให้สามารถกําหนดรายการด้วยแบบแผนการตั้งชื่อที่กําหนดเองระบุรูปแบบภาพความละเอียดและตัวแปรเทมเพลตชื่อไฟล์ต่างๆ
หากต้องการเข้าถึงการตั้งค่าการส่งออกรายการ ให้ไปที่ส่วน รายการ แล้วคลิก ส่งออก ในเมนูเหนือรายการ :
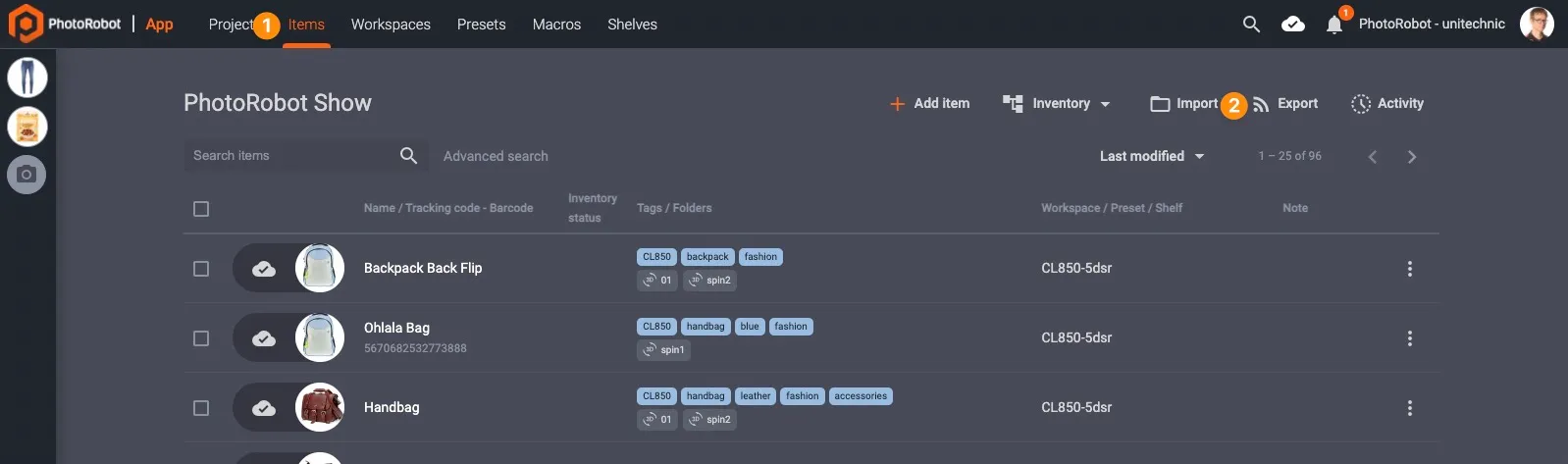
หน้าต่างต่อไปนี้จะเปิดขึ้น โดยอนุญาตให้คุณเปลี่ยนแปลงการตั้งค่าการส่งออก:
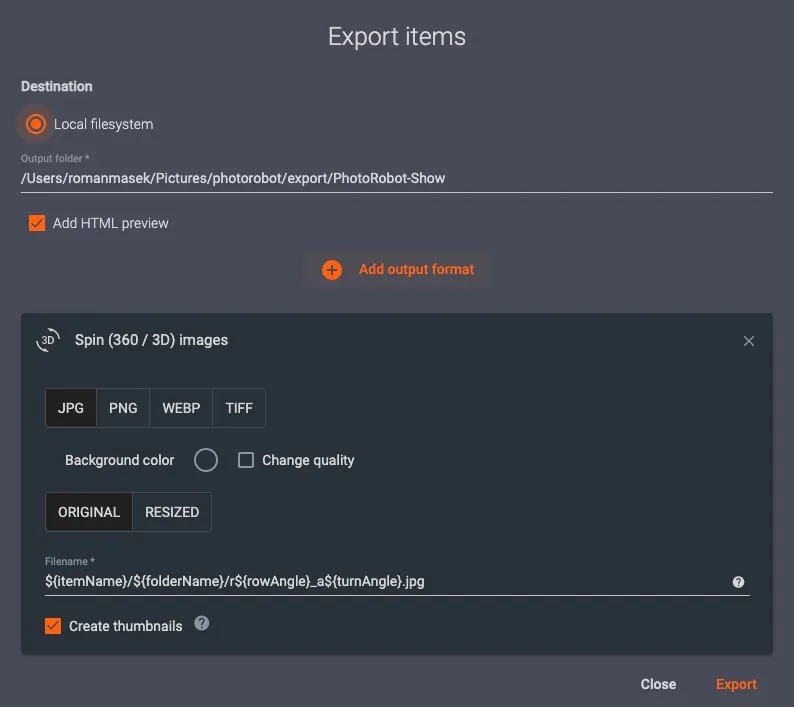
เรียกใช้กระบวนการส่งออกโดยคลิกปุ่ม ส่งออก ที่มุมล่างขวาของหน้าต่าง นี้
เมื่อแถบความคืบหน้าการส่งออกถึงจุดสิ้นสุดแล้ว คุณสามารถคลิก เปิดโฟลเดอร์ เพื่อเข้าถึงรูปที่ส่งออกของคุณ
เผยแพร่ผ่านคลาวด์
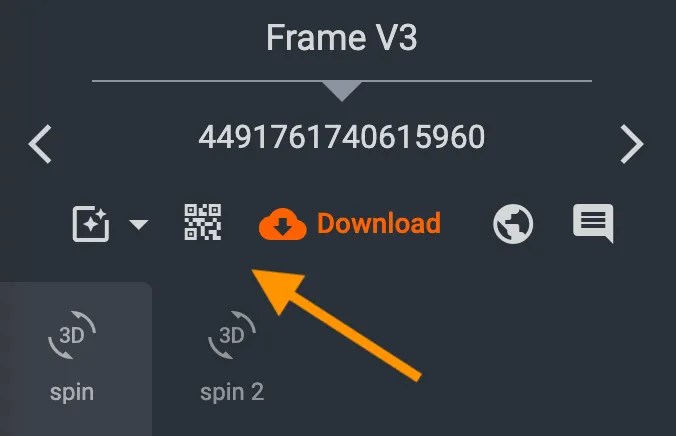
หากเผยแพร่ผ่านบริการPhotoRobot Cloud ก่อนอื่นให้เปิดรายการในระบบคลาวด์ อินเทอร์เฟซแสดงภาพที่จับภาพได้ คลิกปุ่ม รหัสและลิงก์:
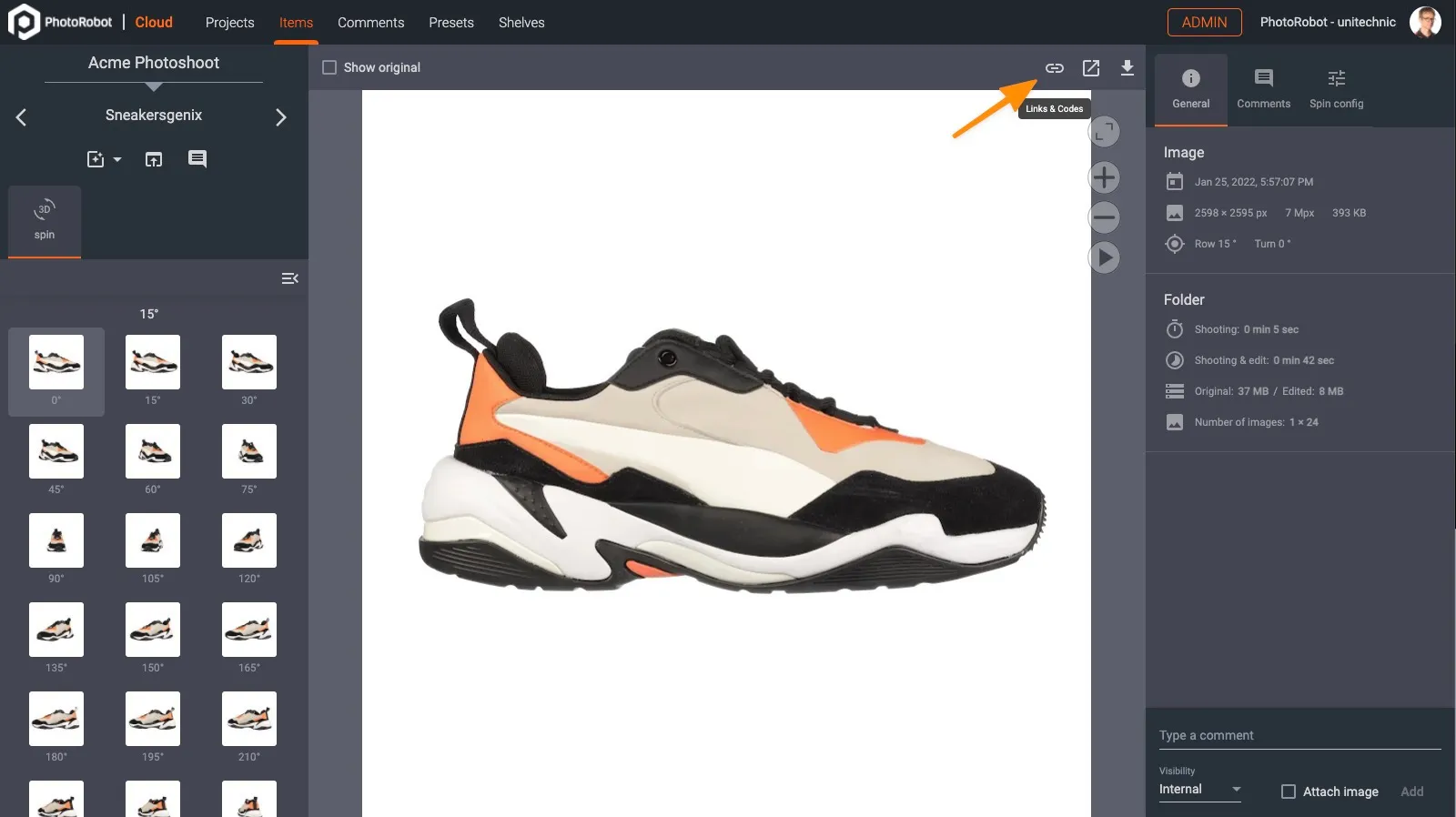
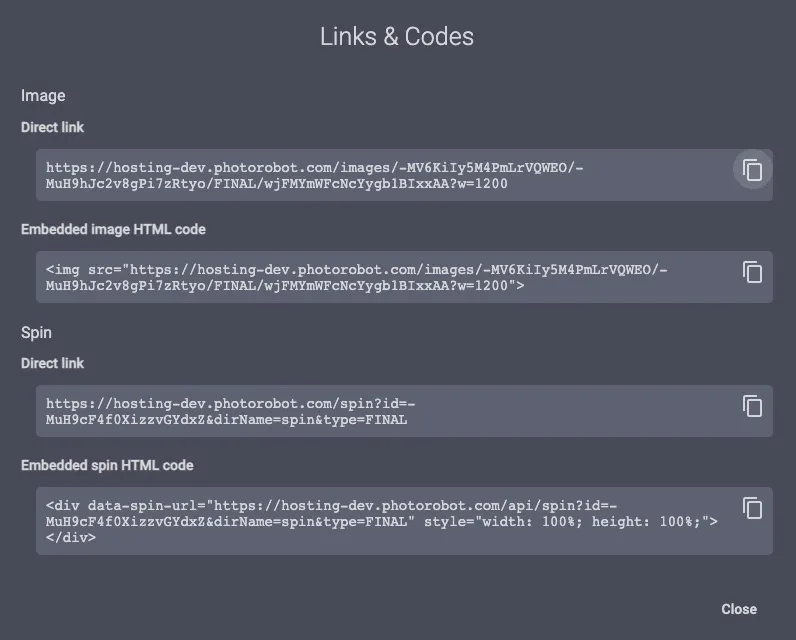
คัดลอก ลิงก์โดยตรง และวางลงในเบราว์เซอร์ของคุณเพื่อดูภาพหรือหมุน ถ้าพอใจแล้ว ให้คัดลอกโค้ด HTML แบบฝังตัว วางโค้ดนี้ลงบนหน้าของคุณเพื่อฝังการหมุนสําหรับการแสดงผล


EOS Rebel ซีรีส์


EOS DSLR ซีรี่ส์


EOS M ซีรีส์มิเรอร์เลส


ซีรีส์ PowerShot


โคลสอัพ / มือถือ

Canon EOS Rebel Series นําเสนอกล้อง DSLR ที่เป็นมิตรกับผู้เริ่มต้น ด้วยคุณภาพของภาพที่มั่นคง การควบคุมที่ใช้งานง่าย และคุณสมบัติที่หลากหลาย กล้องเหล่านี้เหมาะอย่างยิ่งสําหรับผู้ที่ชื่นชอบการถ่ายภาพ ให้โฟกัสอัตโนมัติที่เชื่อถือได้ หน้าจอสัมผัสแบบปรับมุมได้ และการบันทึกวิดีโอ Full HD หรือ 4K
การเชื่อมต่อ
ความละเอียด (MP)
มติ
Canon EOS DSLR Series ให้ภาพคุณภาพสูง ออโต้โฟกัสที่รวดเร็ว และความอเนกประสงค์ ทําให้เหมาะสําหรับทั้งการถ่ายภาพและการผลิตวิดีโอ
การเชื่อมต่อ
ความละเอียด (MP)
มติ
Canon EOS M Mirrorless Series ผสมผสานการออกแบบที่กะทัดรัดเข้ากับประสิทธิภาพที่เหมือนกล้อง DSLR กล้องเหล่านี้มีเลนส์แบบเปลี่ยนได้ โฟกัสอัตโนมัติที่รวดเร็ว และเซ็นเซอร์ภาพคุณภาพสูง จึงเหมาะสําหรับนักเดินทางและผู้สร้างเนื้อหาที่ต้องการพกพาโดยไม่ลดทอนคุณภาพของภาพ
การเชื่อมต่อ
ความละเอียด (MP)
มติ
Canon PowerShot Series นําเสนอกล้องขนาดกะทัดรัดที่ใช้งานง่ายสําหรับผู้ที่ชื่นชอบการถ่ายภาพทั่วไป ด้วยรุ่นต่างๆ ตั้งแต่กล้องเล็งแล้วถ่ายภาพแบบธรรมดาไปจนถึงกล้องซูมขั้นสูง ให้ความสะดวกสบาย คุณภาพของภาพที่มั่นคง และคุณสมบัติต่างๆ เช่น ระบบป้องกันภาพสั่นและวิดีโอ 4K
การเชื่อมต่อ
ความละเอียด (MP)
มติ
กล้องโคลสอัพและกล้องมือถือของ Canon ได้รับการออกแบบมาสําหรับการถ่ายภาพและวิดีโอที่มีรายละเอียดและระยะใกล้ ขนาดกะทัดรัดและใช้งานง่าย ให้โฟกัสที่แม่นยํา การถ่ายภาพความละเอียดสูง และความสามารถด้านมาโครที่หลากหลาย เหมาะสําหรับวิดีโอบล็อก การถ่ายภาพผลิตภัณฑ์ และการถ่ายภาพระยะใกล้ที่สร้างสรรค์
การเชื่อมต่อ
ความละเอียด (MP)
มติ


